目标不是漂亮,是能过
使用方法
每章按“听懂概念 → 识别题型 → 照模板做题 → 自己复述”的顺序学。你不需要一开始就懂所有证明,先把能拿分的计算和判断题抓稳。
第一遍只看“先听懂”和“考场能拿分”,把每个词是什么意思弄清楚。
第二遍看例题精讲,遮住答案自己写一遍步骤。
第三遍刷过关练习。不会就回到对应模板,不要硬扛。
考前只看速查表、易错清单和你自己不会的例题。
15 天复习路线
每天至少完成一个“讲懂任务”和一个“手写任务”。高代最怕眼睛会、手不会,所以每一天都要写。
雨课堂课程范围
已从 cj 登录后的雨课堂“学习内容”确认:本学期高等代数(2)共 19 个教学活动,集中在四章。复习资料只围绕这四章展开。
第五章 二次型 · 4 次课
第六章 线性空间 · 7 次课
第七章 线性变换 · 5 次课
第九章 欧几里得空间 · 3 次课
ExamPass 复习入口
这份网页现在按 `exampass` 结构整理:先用知识清单把逻辑讲清楚,再用章节测试检查会不会做题,最后用来源对照确认没有偏离老师雨课堂范围。
Chapter 5
第五章 二次型
这一章考试最常见的任务:写矩阵、化标准形、判断正定、理解合同。它很适合拿基础分,因为步骤比较固定。
过关知识清单:二次型的考试主线 必考
Hook:老师给你一个带 $x_1x_2$、$x_1^2$ 的式子,真正想考的不是展开,而是你能不能把它变成矩阵,再用矩阵方法判断它的正负性质。
二次型 = 对称矩阵 + 合同变换 + 正负平方项个数。考试里大多数题都围绕这三件事转。
Why:直接看多项式很乱,但写成 $X^TAX$ 后,问题就变成矩阵问题;化成标准形后,正项、负项、零项一眼能看出来。
What:合同变换是 $A$ 变成 $C^TAC$,服务二次型;规范形只留下 $1,-1,0$;惯性指数就是正平方项和负平方项个数。
How:遇到二次型题,按「写矩阵 --> 化标准形/规范形 --> 判断正定或惯性指数」走。写矩阵时,交叉项 $kx_ix_j$ 一定拆成两个 $k/2$ 放对称位置。
易错:合同不是相似。二次型题写 $C^TAC$,不要写成 $P^{-1}AP$;交叉项不要把 $6x_1x_2$ 直接写成 $a_{12}=6$。
Checkpoint:$4x_1x_2$ 在矩阵的 $a_{12},a_{21}$ 位置分别是多少?
参考答案
都是 2。因为展开 $X^TAX$ 时,交叉项来自 $a_{12}x_1x_2+a_{21}x_2x_1=2a_{12}x_1x_2$。1. 二次型到底是什么(必须彻底理解的基础)
二次型就是”所有项都是二次”的多项式,比如 $x_1^2$、$x_1x_2$、$x_2^2$。它没有一次项(如 $x_1$),也没有常数项(如 $5$)。
小白理解(考试必须知道的三个角度):
角度1 - 形式角度:二次型就是多个”二次项”的和。二次项只有两种:平方项($x_i^2$)和交叉项($x_ix_j$,$i\ne j$)。
角度2 - 矩阵角度:任何二次型都能写成 $X^TAX$,其中 $X$ 是列向量,$A$ 是对称矩阵。这样写的好处是把多项式问题转化成矩阵问题。
角度3 - 几何角度:老师让你研究二次型,本质是想知道它在不同变量替换后能不能变简单(化成只有平方项),以及它的”正负性”(永远正、永远负、还是有正有负)。
标准数学表示(考试必写形式):
$$f(x_1,\dots,x_n)=X^TAX,\quad X=(x_1,\dots,x_n)^T$$
其中 $A$ 必须是对称矩阵,即 $A^T=A$。
为什么 $A$ 必须对称?(考试可能会问)
因为任何二次型都可以用对称矩阵表示。如果你用了非对称矩阵,虽然展开结果可能相同,但:
- 对称矩阵是唯一的,避免歧义
- 只有对称矩阵才能用后面的”合同变换”理论
- 考试中如果你写了非对称矩阵,会被扣分
考试陷阱警告:交叉项最容易错!
比如 $4x_1x_2$ 在矩阵中对应 $a_{12}=a_{21}=2$(不是4!),因为展开 $X^TAX$ 时会出现 $a_{12}x_1x_2 + a_{21}x_2x_1 = 2a_{12}x_1x_2$。
记忆口诀:交叉项系数一分为二,对称位置各放一半。
辨析练习:哪些是二次型?
判断下列式子是否为二次型,并说明理由:
- $f=x_1^2+3x_1x_2-x_2^2$ ✓ 是二次型(所有项都是二次)
- $f=x_1^2+2x_1+1$ ✗ 不是(有一次项 $2x_1$ 和常数项 $1$)
- $f=x_1x_2+x_2x_3$ ✓ 是二次型(虽然没有平方项,但都是二次交叉项)
- $f=2x_1^2-x_1x_2x_3$ ✗ 不是($x_1x_2x_3$ 是三次项)
得分技巧:考试判断题如果问”某个式子是不是二次型”,你只需要检查两点:①有没有非二次项?②有没有常数项?两个答案都是”没有”才是二次型。
2. 怎么把二次型写成矩阵(考试必考,必须100%掌握)
考场标准步骤(按这个顺序写不会错)
- 第一步:数变量个数 → 确定矩阵是几阶方阵
- 第二步:填对角线 → 平方项 $a_ix_i^2$ 的系数 $a_i$ 直接放在 $a_{ii}$
- 第三步:填对称位置 → 交叉项 $kx_ix_j$ 的系数 $k$ 一分为二,$a_{ij}=a_{ji}=k/2$
- 第四步:填零 → 没有出现的交叉项对应位置填 $0$
- 第五步:检查对称 → 必须满足 $a_{ij}=a_{ji}$(沿主对角线对称)
为什么交叉项要除以2?(理解这个,就不会记错)
展开 $X^TAX$ 时,$a_{12}$ 位置的元素会产生 $x_1 \cdot a_{12} \cdot x_2$,
同时 $a_{21}$ 位置的元素会产生 $x_2 \cdot a_{21} \cdot x_1 = a_{21} \cdot x_1x_2$。
因为对称矩阵 $a_{12}=a_{21}$,所以总贡献是 $2a_{12}x_1x_2$。
如果原二次型中是 $6x_1x_2$,那么 $2a_{12}=6$,所以 $a_{12}=3$。
例题 1:标准的二次型→矩阵(必须会做的基础题)
题目:设 $f=2x_1^2+6x_1x_2+3x_2^2-4x_1x_3+x_3^2$,写出矩阵 $A$。
解题思路(逐步拆解):
- 【确定维度】变量有 $x_1,x_2,x_3$ 三个,所以 $A$ 是 $3\times3$ 矩阵。
- 【先画框架】在草稿纸上画出 $3\times3$ 的空框: $$A=\begin{pmatrix}\Box&\Box&\Box\\\Box&\Box&\Box\\\Box&\Box&\Box\end{pmatrix}$$
- 【填对角线】找所有平方项:
- $2x_1^2$ → $a_{11}=2$
- $3x_2^2$ → $a_{22}=3$
- $x_3^2=1\cdot x_3^2$ → $a_{33}=1$
- 【填交叉项(这是易错点!)】
- $6x_1x_2$:系数是6,除以2得3,所以 $a_{12}=a_{21}=3$
- $-4x_1x_3$:系数是-4,除以2得-2,所以 $a_{13}=a_{31}=-2$
- 没有 $x_2x_3$ 项,所以 $a_{23}=a_{32}=0$
- 【写出完整矩阵】 $$A=\begin{pmatrix}2&3&-2\\3&3&0\\-2&0&1\end{pmatrix}$$
- 【检查对称性】看 $a_{12}=a_{21}=3$ ✓,$a_{13}=a_{31}=-2$ ✓,$a_{23}=a_{32}=0$ ✓
得分关键点(考试要注意):
- ❌ 常见错误1:把 $6x_1x_2$ 的系数6直接填入 $a_{12}$,这样展开会变成 $12x_1x_2$,直接扣光这题的分
- ❌ 常见错误2:忘记负号,把 $-4x_1x_3$ 写成 $a_{13}=2$
- ✓ 保险做法:写完后随机挑一项验证,比如验证 $(1,1,1)^T$ 代入展开式是否等于原式代入的值
例题 2:没有平方项的二次型(稍难变式)
题目:$f=2x_1x_2+4x_1x_3-6x_2x_3$,写出矩阵 $A$。
解答:
- 三个变量,所以 $A$ 是 $3\times3$ 矩阵
- 没有任何平方项,所以对角线全是0:$a_{11}=a_{22}=a_{33}=0$
- 交叉项:
- $2x_1x_2$ → $a_{12}=a_{21}=1$
- $4x_1x_3$ → $a_{13}=a_{31}=2$
- $-6x_2x_3$ → $a_{23}=a_{32}=-3$
- 最终:$$A=\begin{pmatrix}0&1&2\\1&0&-3\\2&-3&0\end{pmatrix}$$
重要提示:没有平方项不代表不是二次型!对角线全是0的对称矩阵完全合法。
例题 3:反向问题——从矩阵写出二次型(也会考)
题目:$A=\begin{pmatrix}1&-2&0\\-2&3&1\\0&1&-1\end{pmatrix}$,写出对应的二次型 $f$。
解答步骤:
- 【读对角线得平方项】$a_{11}=1$ → $x_1^2$,$a_{22}=3$ → $3x_2^2$,$a_{33}=-1$ → $-x_3^2$
- 【读上三角得交叉项】(只看上三角,然后系数×2)
- $a_{12}=-2$ → 交叉项是 $2\times(-2)x_1x_2=-4x_1x_2$
- $a_{13}=0$ → 没有 $x_1x_3$ 项
- $a_{23}=1$ → 交叉项是 $2\times1x_2x_3=2x_2x_3$
- 【合并写出】$$f=x_1^2-4x_1x_2+3x_2^2+2x_2x_3-x_3^2$$
技巧:从矩阵到二次型时,只看上三角(或只看下三角),交叉项系数要×2,避免重复计算。
立即自测(做对了才算真的会)
练习1:$f=x_1^2-2x_1x_2+x_2^2+4x_2x_3$,写出矩阵 $A$。
点击查看答案
$$A=\begin{pmatrix}1&-1&0\\-1&1&2\\0&2&0\end{pmatrix}$$注意:$-2x_1x_2$ → $a_{12}=a_{21}=-1$,$4x_2x_3$ → $a_{23}=a_{32}=2$
练习2:$A=\begin{pmatrix}2&0&1\\0&-1&3\\1&3&0\end{pmatrix}$,写出二次型。
点击查看答案
$$f=2x_1^2-x_2^2+2x_1x_3+6x_2x_3$$注意:$a_{13}=1$ → 交叉项 $2\times1x_1x_3=2x_1x_3$
3. 合同变换和标准形(难点,需要多看几遍)
核心概念对比(先搞清楚这个,后面才不会混)
| 变换类型 | 公式 | 服务对象 | 关心什么 | 考试易混点 |
| 合同变换 | $B=C^TAC$ | 二次型 | 正负平方项个数 | $C$ 在前面有转置 |
| 相似变换 | $B=P^{-1}AP$ | 线性变换 | 特征值和对角化 | $P$ 有逆没有转置 |
为什么是 $C^TAC$ 而不是 $C^{-1}AC$?
因为二次型做变量替换 $X=CY$ 时:
$f=X^TAX = (CY)^T A (CY) = Y^T (C^TAC) Y$
自然出现 $C^T$,不是 $C^{-1}$。考试中写错这个会被扣概念分!
标准形的定义:通过可逆变量替换,把二次型化成只有平方项的形式:
$$f = d_1y_1^2 + d_2y_2^2 + \cdots + d_ry_r^2$$
其中 $d_i$ 可以是任意非零实数,$r$ 是矩阵的秩。
规范形的定义:标准形的特殊情况,所有系数 $d_i$ 只能是 $1$、$-1$ 或 $0$:
$$f = y_1^2 + \cdots + y_p^2 - y_{p+1}^2 - \cdots - y_{p+q}^2$$
- 正惯性指数 = 正平方项个数 = $p$
- 负惯性指数 = 负平方项个数 = $q$
- 秩 = 非零项个数 = $p+q = r$
惯性定理(考试必背)
对于同一个二次型,无论用什么可逆变换化成规范形,正惯性指数和负惯性指数都是固定不变的。
考试意义:这意味着你可以用任何方法化标准形(配方法、初等变换法等),正负号个数是唯一确定的,可以用来验算。
例题 2:配方法化标准形(最常考的计算题型)
题目:化 $f=x_1^2+2x_1x_2+3x_2^2$ 为标准形。
完整解答(按考试标准步骤写):
- 【观察】有 $x_1^2$ 项,可以用配方法。目标是凑出完全平方 $(x_1+?)^2$。
- 【配方】
看含 $x_1$ 的所有项:$x_1^2 + 2x_1x_2$
这可以配成 $(x_1+x_2)^2$,因为:
$$(x_1+x_2)^2 = x_1^2 + 2x_1x_2 + x_2^2$$
原式中 $x_1^2 + 2x_1x_2$ 就是这个展开式的前两项。
- 【整理剩余项】
$$\begin{align} f &= x_1^2 + 2x_1x_2 + 3x_2^2\\ &= (x_1+x_2)^2 - x_2^2 + 3x_2^2 \quad \text{(从 }(x_1+x_2)^2\text{ 中借出了 }x_2^2\text{)}\\ &= (x_1+x_2)^2 + 2x_2^2 \end{align}$$
- 【设新变量】
令 $\begin{cases}y_1 = x_1+x_2\\ y_2 = x_2\end{cases}$,即 $\begin{cases}x_1 = y_1-y_2\\ x_2 = y_2\end{cases}$
- 【写出标准形和变换矩阵】
标准形:$f = y_1^2 + 2y_2^2$
变换矩阵:$X = CY$,其中 $C=\begin{pmatrix}1&-1\\1&0\end{pmatrix}$(从 $x_1=1\cdot y_1-1\cdot y_2$ 和 $x_2=0\cdot y_1+1\cdot y_2$ 得出)
- 【验证(考试时写这步能加印象分)】
正惯性指数 = 2(两个正平方项),负惯性指数 = 0,秩 = 2。
原矩阵 $A=\begin{pmatrix}1&1\\1&3\end{pmatrix}$ 的秩也是2 ✓
得分要点:
- ✓ 必须写出变换关系($y_1=$什么,$y_2=$什么)
- ✓ 最终答案要明确写"标准形为 $f=...$"
- ❌ 不要只写结果不写步骤,配方过程必须展示
例题 3:没有平方项怎么办?(必须掌握的技巧)
题目:化 $f=2x_1x_2+2x_1x_3-6x_2x_3$ 为标准形。
思路分析:没有平方项就无法直接配方,需要先造平方项。
完整解答:
- 【造平方项】用替换公式(必须记住):
$$\begin{cases} x_1 = y_1 + y_2\\ x_2 = y_1 - y_2\\ x_3 = y_3 \end{cases}$$
这样 $x_1x_2 = (y_1+y_2)(y_1-y_2) = y_1^2 - y_2^2$ 就出现平方项了。
- 【代入并展开】
$$\begin{align} f &= 2x_1x_2 + 2x_1x_3 - 6x_2x_3\\ &= 2(y_1^2-y_2^2) + 2(y_1+y_2)y_3 - 6(y_1-y_2)y_3\\ &= 2y_1^2 - 2y_2^2 + 2y_1y_3 + 2y_2y_3 - 6y_1y_3 + 6y_2y_3\\ &= 2y_1^2 - 2y_2^2 - 4y_1y_3 + 8y_2y_3 \end{align}$$
- 【继续配方】现在有 $y_1^2$ 了,配含 $y_1$ 的项:
$$\begin{align} f &= 2(y_1^2 - 2y_1y_3) - 2y_2^2 + 8y_2y_3\\ &= 2[(y_1-y_3)^2 - y_3^2] - 2y_2^2 + 8y_2y_3\\ &= 2(y_1-y_3)^2 - 2y_3^2 - 2y_2^2 + 8y_2y_3\\ &= 2(y_1-y_3)^2 - 2(y_2^2 - 4y_2y_3)\\ &= 2(y_1-y_3)^2 - 2[(y_2-2y_3)^2 - 4y_3^2]\\ &= 2(y_1-y_3)^2 - 2(y_2-2y_3)^2 + 8y_3^2 \end{align}$$
- 【最终标准形】
令 $\begin{cases}z_1 = y_1-y_3\\ z_2 = y_2-2y_3\\ z_3 = y_3\end{cases}$
标准形:$f = 2z_1^2 - 2z_2^2 + 8z_3^2$
正惯性指数 = 2,负惯性指数 = 1,秩 = 3
关键技巧总结:
- 没有平方项时,优先用 $x_i = y_i+y_j, x_j = y_i-y_j$ 造出 $y_i^2 - y_j^2$
- 如果只有一个交叉项 $x_1x_2$,也可以用 $x_1=y_1, x_2=y_1+y_2$ 造出 $y_1^2 + y_1y_2$
例题 4:特殊情况——已知变换求标准形(逆向题)
题目:已知二次型 $f=x_1^2+2x_2^2+5x_3^2+2x_1x_2-2x_1x_3-4x_2x_3$ 经变换 $X=CY$ 化为标准形 $f=y_1^2+y_2^2$,求 $C$。
思路:这是考研常见题型,需要用 $C^TAC=D$ 求解,其中 $D$ 是标准形的矩阵。
解答步骤:
- 写出原矩阵:$A=\begin{pmatrix}1&1&-1\\1&2&-2\\-1&-2&5\end{pmatrix}$
- 标准形矩阵:$D=\begin{pmatrix}1&0&0\\0&1&0\\0&0&0\end{pmatrix}$(注意秩是2,所以第三个平方项系数是0)
- 需要找 $C$ 使得 $C^TAC=D$
- 方法1:用初等变换同时化 $(A|E)$ 为 $(E|C^{-T})$,然后转置
- 方法2:先对角化 $A$,再单位化(这题用正交对角化更简单)
考试建议:这种题计算量大,如果时间不够,优先做其他题。
配方法速查表(考场直接套用)
| 情况 | 配方技巧 | 例子 |
| 有 $x_1^2$ 和 $x_1x_2$ | 配成 $(x_1+ax_2)^2$ | $x_1^2+4x_1x_2 = (x_1+2x_2)^2 - 4x_2^2$ |
| 只有 $x_1x_2$,无平方项 | $x_1=y_1+y_2, x_2=y_1-y_2$ | $x_1x_2 = (y_1+y_2)(y_1-y_2) = y_1^2-y_2^2$ |
| 多变量复杂式 | 逐个消去,先配 $x_1$,再配 $x_2$... | 见例题2的步骤 |
立即练习(不看答案先自己做一遍)
练习1:化 $f=x_1^2-4x_1x_2+5x_2^2$ 为标准形。
点击查看详细解答
- 配方:$f = (x_1-2x_2)^2 - 4x_2^2 + 5x_2^2 = (x_1-2x_2)^2 + x_2^2$
- 令 $y_1=x_1-2x_2, y_2=x_2$
- 标准形:$f = y_1^2 + y_2^2$
- 正惯性指数=2,负惯性指数=0
练习2:化 $f=x_1x_2$ 为标准形。
点击查看详细解答
- 令 $x_1=y_1+y_2, x_2=y_1-y_2$
- 代入:$f = (y_1+y_2)(y_1-y_2) = y_1^2 - y_2^2$
- 标准形:$f = y_1^2 - y_2^2$
- 正惯性指数=1,负惯性指数=1
4. 正定怎么判断(必考大题,分值高)
正定的三种理解角度(从简单到深入)
- 定义角度:除了零向量,代入任何向量 $X$,都有 $X^TAX > 0$(永远是正数)
- 几何角度:二次型对应的曲面是”向上开口的碗”,没有鞍点
- 考试角度:用顺序主子式判别,全部大于0就是正定
为什么要研究正定?(考试可能会以选择题形式考察)
① 优化问题:正定矩阵对应的函数有唯一最小值点
② 稳定性分析:系统稳定性与矩阵正定性相关
③ 内积定义:正定矩阵可以用来定义内积
实际考试中:你只需要会判断和计算,不需要深入理解这些应用。
正定判别的5种方法(按考试实用度排序)
| 方法 | 判别条件 | 适用场景 | 考试推荐度 |
| 顺序主子式 | $\Delta_1>0, \Delta_2>0, ..., \Delta_n>0$ | 任何对称矩阵 | ⭐⭐⭐⭐⭐ 必会 |
| 特征值 | 所有特征值 $>0$ | 容易算特征值时 | ⭐⭐⭐⭐ 常用 |
| 定义法 | $X^TAX>0$ 对所有 $X\ne0$ 成立 | 理论证明题 | ⭐⭐⭐ 选用 |
| 合同标准形 | 规范形全是正平方项 | 已经化了标准形 | ⭐⭐ 偶尔 |
| 正定定义推论 | 对角元全$>0$且$|A|>0$ | 快速排除法 | ⭐ 辅助 |
顺序主子式法(考试标准步骤,必须100%掌握)
什么是顺序主子式?
从左上角开始,逐渐扩大的方阵行列式:
- $\Delta_1 = a_{11}$ (1阶主子式,就是左上角元素)
- $\Delta_2 = \begin{vmatrix}a_{11}&a_{12}\\a_{21}&a_{22}\end{vmatrix}$ (2阶主子式)
- $\Delta_3 = \begin{vmatrix}a_{11}&a_{12}&a_{13}\\a_{21}&a_{22}&a_{23}\\a_{31}&a_{32}&a_{33}\end{vmatrix}$ (3阶主子式)
- 以此类推...
判别步骤:
- 确认 $A$ 是实对称矩阵($A^T=A$),否则不能用此方法
- 计算 $\Delta_1, \Delta_2, ..., \Delta_n$
- 若全部大于0,则 $A$ 正定
- 若有任何一个 $\leq 0$,则 $A$ 不正定
常见错误警告:
❌ 错误1:只算了 $|A|>0$ 就说正定(这只是必要条件,不充分!)
❌ 错误2:算了几个非顺序的主子式(必须是从左上角开始连续的)
❌ 错误3:对角元都大于0就说正定(反例:$\begin{pmatrix}1&2\\2&1\end{pmatrix}$ 对角元都是1,但 $|A|=-3<0$,不正定)
✓ 正确做法:老老实实按顺序算 $\Delta_1, \Delta_2, ..., \Delta_n$,一个都不能少
例题 3.1:标准的正定判别(必须会的基础题)
题目:判断 $A=\begin{pmatrix}1&2&0\\2&5&1\\0&1&3\end{pmatrix}$ 是否正定。
完整解答(考试标准格式):
- 【检查对称性】
$A^T = \begin{pmatrix}1&2&0\\2&5&1\\0&1&3\end{pmatrix} = A$,所以 $A$ 是实对称矩阵,可以用顺序主子式法。
- 【计算 $\Delta_1$(1阶主子式)】
$\Delta_1 = a_{11} = 1 > 0$ ✓
- 【计算 $\Delta_2$(2阶主子式)】
$$\Delta_2 = \begin{vmatrix}1&2\\2&5\end{vmatrix} = 1\times5 - 2\times2 = 5-4 = 1 > 0$$ ✓
- 【计算 $\Delta_3$(3阶主子式,即 $|A|$)】
按第一行展开:
$$\begin{align} \Delta_3 = |A| &= 1\cdot\begin{vmatrix}5&1\\1&3\end{vmatrix} - 2\cdot\begin{vmatrix}2&1\\0&3\end{vmatrix} + 0\cdot\begin{vmatrix}2&5\\0&1\end{vmatrix}\\ &= 1\times(5\times3-1\times1) - 2\times(2\times3-1\times0)\\ &= 1\times(15-1) - 2\times6\\ &= 14 - 12\\ &= 2 > 0 \end{align}$$ ✓
- 【得出结论】
因为 $\Delta_1=1>0$,$\Delta_2=1>0$,$\Delta_3=2>0$,所以 $A$ 正定。
考场写法提醒:
- 每个主子式计算过程都要写出来,不要只写结果
- 每算完一个主子式,标注 “>0” 或 “✓” 表示通过
- 最后用完整句子给出结论:”因为...所以...正定”
例题 3.2:不正定的情况(会判断不正定也很重要)
题目:判断 $B=\begin{pmatrix}2&3&1\\3&4&2\\1&2&1\end{pmatrix}$ 是否正定。
解答:
- $B$ 是对称矩阵 ✓
- $\Delta_1 = 2 > 0$ ✓
- $\Delta_2 = \begin{vmatrix}2&3\\3&4\end{vmatrix} = 8-9 = -1 < 0$ ✗
结论:因为 $\Delta_2<0$,所以 $B$ 不正定。
(注意:一旦发现某个主子式 $\leq 0$,就可以立即停止计算,直接判定不正定)
例题 3.3:含参数的正定判别(综合题常考)
题目:$A=\begin{pmatrix}1&a&0\\a&2&0\\0&0&3\end{pmatrix}$ 正定,求 $a$ 的取值范围。
完整解答:
- 【列出顺序主子式】
$\Delta_1 = 1$
$\Delta_2 = \begin{vmatrix}1&a\\a&2\end{vmatrix} = 2-a^2$
$\Delta_3 = |A| = 3\cdot\begin{vmatrix}1&a\\a&2\end{vmatrix} = 3(2-a^2) = 6-3a^2$
- 【列出不等式组】
$A$ 正定的充要条件是:
$$\begin{cases} \Delta_1 = 1 > 0 &\text{(自动满足)}\\ \Delta_2 = 2-a^2 > 0 &\Rightarrow a^2 < 2 \Rightarrow -\sqrt{2} < a < \sqrt{2}\\ \Delta_3 = 6-3a^2 > 0 &\Rightarrow a^2 < 2 \Rightarrow -\sqrt{2} < a < \sqrt{2} \end{cases}$$
- 【求交集】
两个条件都是 $-\sqrt{2} < a < \sqrt{2}$,所以答案就是 $a\in(-\sqrt{2}, \sqrt{2})$。
技巧:有参数时,把所有主子式用 $a$ 表示出来,然后解不等式组。
例题 3.4:用特征值判断正定(有时更简单)
题目:$A=\begin{pmatrix}3&1\\1&3\end{pmatrix}$ 是否正定?
方法1:顺序主子式法
$\Delta_1=3>0$,$\Delta_2=\begin{vmatrix}3&1\\1&3\end{vmatrix}=9-1=8>0$,所以正定。
方法2:特征值法(有时更快)
- 求特征值:$|\lambda I-A| = \begin{vmatrix}\lambda-3&-1\\-1&\lambda-3\end{vmatrix} = (\lambda-3)^2-1 = 0$
- 解得 $\lambda_1=4, \lambda_2=2$
- 两个特征值都 $>0$,所以 $A$ 正定
选择哪个方法?
- 2阶、3阶矩阵:顺序主子式通常更快
- 对角占优或有特殊结构:特征值可能更简单
- 考试时:优先用顺序主子式,因为过程更直接
其他正定性质(选择题可能考)
- $A$ 正定 ⇔ 存在可逆矩阵 $C$ 使得 $A=C^TC$
- $A$ 正定 ⇔ $A$ 与单位矩阵 $E$ 合同
- $A,B$ 都正定 ⇒ $A+B$ 正定(但 $AB$ 不一定正定!)
- $A$ 正定 ⇒ $A^{-1}$ 也正定
- $A$ 正定 ⇒ $|A|>0$(但反过来不成立)
负定、半正定、半负定(了解即可)
• 负定:所有顺序主子式奇数阶<0,偶数阶>0(或所有特征值<0)
• 半正定:所有主子式(不只是顺序的)≥0(或所有特征值≥0)
• 半负定:所有主子式符号交替且可以为0
• 不定:以上都不满足(既有正也有负)
考试重点:90%的题只考正定,负定和半定了解概念即可。
立即练习(动手算一遍才算会)
练习1:判断 $A=\begin{pmatrix}2&-1\\-1&2\end{pmatrix}$ 是否正定。
点击查看详细解答
- $\Delta_1 = 2 > 0$ ✓
- $\Delta_2 = \begin{vmatrix}2&-1\\-1&2\end{vmatrix} = 4-1 = 3 > 0$ ✓
- 所以 $A$ 正定
练习2:$A=\begin{pmatrix}4&2&0\\2&a&0\\0&0&1\end{pmatrix}$ 正定,求 $a$ 的范围。
点击查看详细解答
- $\Delta_1 = 4 > 0$ ✓(自动满足)
- $\Delta_2 = 4a-4 > 0 \Rightarrow a > 1$
- $\Delta_3 = 1\cdot(4a-4) = 4a-4 > 0 \Rightarrow a > 1$
- 所以 $a \in (1, +\infty)$
练习3(陷阱题):$A=\begin{pmatrix}3&4\\4&3\end{pmatrix}$ 的对角元都大于0,是否一定正定?
点击查看详细解答
不一定!必须算主子式:
- $\Delta_1 = 3 > 0$ ✓
- $\Delta_2 = 9-16 = -7 < 0$ ✗
- 所以 $A$ 不正定
教训:对角元>0只是必要条件,不能直接判定正定!
考场时间分配建议
- 2阶矩阵正定判别:2分钟内完成(很简单,不要丢分)
- 3阶矩阵正定判别:3-5分钟(主要时间在算 $|A|$)
- 含参数求范围:5-7分钟(要列不等式组)
- 4阶及以上:如果没有特殊结构,可能不值得花时间,优先做其他题
第五章综合训练(考前必刷题型)
综合题1:完整的二次型大题流程
题目:已知二次型 $f=x_1^2+2x_2^2+2x_1x_2+2x_1x_3$。
(1)写出二次型矩阵 $A$;
(2)用配方法化为标准形;
(3)求正负惯性指数;
(4)判断是否正定。
点击查看完整解答
(1)写矩阵:
- 对角:$a_{11}=1, a_{22}=2, a_{33}=0$
- 交叉项:$2x_1x_2$ → $a_{12}=a_{21}=1$,$2x_1x_3$ → $a_{13}=a_{31}=1$
- $$A=\begin{pmatrix}1&1&1\\1&2&0\\1&0&0\end{pmatrix}$$
(2)配方法化标准形:
- $f = x_1^2 + 2x_1x_2 + 2x_1x_3 + 2x_2^2$
- 配 $x_1$:$f = (x_1+x_2+x_3)^2 - x_2^2 - x_3^2 - 2x_2x_3 + 2x_2^2$
- 整理:$f = (x_1+x_2+x_3)^2 + x_2^2 - x_3^2 - 2x_2x_3$
- 继续配 $x_2$:$f = (x_1+x_2+x_3)^2 + (x_2-x_3)^2 - 2x_3^2$
- 令 $y_1=x_1+x_2+x_3, y_2=x_2-x_3, y_3=x_3$
- 标准形:$f = y_1^2 + y_2^2 - 2y_3^2$
(3)惯性指数:
- 正惯性指数 $p = 2$(两个正平方项)
- 负惯性指数 $q = 1$(一个负平方项)
- 秩 $r = p+q = 3$
(4)正定判断:
因为有负平方项($-2y_3^2$),所以不正定。
(正定要求所有平方项都是正的,即正惯性指数 = 秩 = 变量个数)
综合题2:矩阵反推二次型
题目:$A=\begin{pmatrix}2&1&0\\1&2&-1\\0&-1&1\end{pmatrix}$,求对应的二次型及其正惯性指数。
点击查看完整解答
第一步:写出二次型
- 对角线:$2x_1^2 + 2x_2^2 + x_3^2$
- 上三角×2:$2\cdot1\cdot x_1x_2 + 2\cdot0\cdot x_1x_3 + 2\cdot(-1)\cdot x_2x_3$
- $f = 2x_1^2 + 2x_2^2 + x_3^2 + 2x_1x_2 - 2x_2x_3$
第二步:求正惯性指数(用顺序主子式或配方法)
方法1:顺序主子式判断符号
- $\Delta_1 = 2 > 0$
- $\Delta_2 = \begin{vmatrix}2&1\\1&2\end{vmatrix} = 3 > 0$
- $\Delta_3 = 2(2-1) - 1(1-0) = 2-1 = 1 > 0$
- 三个主子式都>0,所以正惯性指数 = 3(正定矩阵)
综合题3:含参数的全面分析
题目:$A=\begin{pmatrix}1&-1&0\\-1&2&a\\0&a&1\end{pmatrix}$,讨论 $a$ 取何值时 $A$ 正定。
点击查看完整解答
- 列出顺序主子式:
- $\Delta_1 = 1 > 0$ ✓
- $\Delta_2 = \begin{vmatrix}1&-1\\-1&2\end{vmatrix} = 2-1 = 1 > 0$ ✓
- $\Delta_3 = 1\cdot\begin{vmatrix}2&a\\a&1\end{vmatrix} - (-1)\cdot\begin{vmatrix}-1&a\\0&1\end{vmatrix}$
- $= 1(2-a^2) + 1(-1) = 2-a^2-1 = 1-a^2$
- 列不等式:
$\Delta_3 = 1-a^2 > 0 \Rightarrow a^2 < 1 \Rightarrow -1 < a < 1$
- 答案:当 $a\in(-1, 1)$ 时,$A$ 正定。
附加问题:当 $a=1$ 或 $a=-1$ 时是什么情况?
此时 $\Delta_3=0$,矩阵半正定(不是正定)。
这一章最低要会什么(60分保命清单)
必须100%掌握(占第五章80%分值):
- ✅ 给二次型能写矩阵,交叉项除以2(5分钟内必须写对)
- ✅ 会配方法化标准形,至少会做2元和3元的标准题
- ✅ 会用顺序主子式判断正定(步骤必须完整)
- ✅ 知道合同变换是 $C^TAC$,不是 $C^{-1}AC$
争取掌握(冲70-80分):
- ◐ 会处理没有平方项的配方(用 $x_1=y_1+y_2, x_2=y_1-y_2$ 造平方项)
- ◐ 会做含参数的正定判别(列不等式求范围)
- ◐ 知道惯性定理,会用正负惯性指数验算
常见失分点(考前再看一遍):
- ❌ 交叉项系数忘记除以2,直接填入矩阵
- ❌ 配方时没有写变量替换关系,只写了最终标准形
- ❌ 正定判别只算了 $|A|>0$,没有算前面的主子式
- ❌ 合同和相似搞混,把 $C^TAC$ 写成 $P^{-1}AP$
- ❌ 顺序主子式算成了非顺序的主子式
Chapter 6
第六章 线性空间
这一章抽象词多,但题目基本会落到“判断、求基、求维数、求坐标、证明直和”。你要把所有抽象问题翻译成矩阵行化简。
过关知识清单:线性空间的考试主线 必考
Hook:看到“集合、向量组、生成、基、维数”不要慌,它们最后通常都会落到一句话:能不能写成线性组合。
线性空间题 = 判断封闭性 + 解线性方程 + 行化简找主元。抽象词只是外壳,计算核心还是方程组。
Why:考试不会只问你背定义,它会把定义藏在题里:比如「是否子空间」考封闭性,「求基」考极大无关组,「求坐标」考线性表示唯一性。
What:子空间要含零向量且对加法、数乘封闭;基是既能生成又线性无关的一组向量;维数就是一组基中向量的个数。
How:判断子空间先代零向量;求基和维数把向量排成列做行化简;求坐标就设未知系数,列出“目标向量 = 基向量线性组合”。
易错:主元列对应的是原矩阵的原向量,不是行化简之后的列。写答案时要回到题目给出的原向量。
Checkpoint:$W=\{(x,y,z):x+y+z=1\}$ 是 $\mathbb R^3$ 的子空间吗?
参考答案
不是。零向量代入得到 $0+0+0=0$,不等于 1,所以零向量不在集合中,直接否定。1. 线性空间是个什么东西(最抽象的概念,但考试很具体)
三个层次理解线性空间(从具体到抽象)
层次1 - 你熟悉的例子:
- $\mathbb{R}^n$:所有 $n$ 维实向量(比如平面向量、空间向量)
- $\mathbb{R}[x]_n$:次数 $\leq n$ 的多项式全体(比如 $1+2x+x^2$)
- $\mathbb{R}^{m\times n}$:所有 $m\times n$ 实矩阵
层次2 - 线性空间的本质:
只要一个集合里的元素能做加法和数乘,并且满足8条运算规律(交换律、结合律等),就是线性空间。
层次3 - 考试只考什么:
考试不会让你验证8条公理,只会考:
- ✓ 判断某个集合是不是子空间(3步:零向量、加法封闭、数乘封闭)
- ✓ 求基、维数、坐标(全部转化成矩阵行化简)
- ✓ 判断线性相关/无关(解齐次方程)
- ✓ 计算子空间的交、和、直和(用维数公式)
小白必读:什么是”抽象”?
高代说”线性空间”不限于几何向量,多项式、矩阵、函数都可以是”向量”。但考试时,90%的题还是在 $\mathbb{R}^n$ 里做,就是你熟悉的数组向量。
所以别被”抽象”吓到,考试题都很具体。
辨析练习:哪些是线性空间?
- $\mathbb{R}^3$(所有三维向量)✓ 是
- 所有首项系数为1的二次多项式 ✗ 不是(零多项式首项不是1,零向量不在里面)
- 所有对角矩阵 ✓ 是(对角矩阵相加还是对角矩阵)
- $\{(x,y,z):x+y=1\}$ ✗ 不是(零向量 $(0,0,0)$ 不满足 $x+y=1$)
判断技巧:先看零元素在不在,不在就直接否定。
2. 子空间判断(送分题,绝对不能丢分)
什么是子空间?
子空间就是大空间里的一个小集合,并且这个小集合自己也能当线性空间(自己关起门来加法、数乘都不会"跑出去")。
子空间三步判别法(考试标准步骤,必须背熟)
| 步骤 | 检查内容 | 考试写法 |
| 第一步 | 零向量在里面吗? | 代入零向量,检查是否满足集合的定义条件 |
| 第二步 | 加法封闭吗? | 设 $\alpha,\beta\in W$,证明 $\alpha+\beta\in W$ |
| 第三步 | 数乘封闭吗? | 设 $\alpha\in W$,任意 $k\in\mathbb{R}$,证明 $k\alpha\in W$ |
记忆口诀:零、加、乘
零向量必须在,加法不能跑出去,乘以数还在里面。
考试快速判断:看到非齐次等式(如 $x+y=1$),立刻判断不是子空间(零向量不满足)。
例题 1:齐次条件是子空间(标准的"是"的例子)
题目:$W=\{(x,y,z)\in\mathbb{R}^3:x+y+z=0\}$ 是不是 $\mathbb{R}^3$ 的子空间?
完整解答(考试标准格式):
- 【检查零向量】
零向量 $(0,0,0)$ 满足 $0+0+0=0$,所以 $\vec{0}\in W$。✓
- 【检查加法封闭】
设 $\alpha=(x_1,y_1,z_1)\in W$,$\beta=(x_2,y_2,z_2)\in W$。
则 $x_1+y_1+z_1=0$ 且 $x_2+y_2+z_2=0$。
$\alpha+\beta=(x_1+x_2, y_1+y_2, z_1+z_2)$,其坐标和为:
$(x_1+x_2)+(y_1+y_2)+(z_1+z_2) = (x_1+y_1+z_1)+(x_2+y_2+z_2) = 0+0 = 0$
所以 $\alpha+\beta\in W$。✓
- 【检查数乘封闭】
设 $\alpha=(x,y,z)\in W$,则 $x+y+z=0$。
对任意 $k\in\mathbb{R}$,$k\alpha=(kx,ky,kz)$,其坐标和为:
$kx+ky+kz = k(x+y+z) = k\cdot0 = 0$
所以 $k\alpha\in W$。✓
- 【结论】
因为 $W$ 含零向量,且对加法、数乘封闭,所以 $W$ 是 $\mathbb{R}^3$ 的子空间。
关键特征:齐次线性方程组的解集一定是子空间。
反例 1:非齐次条件通常不是子空间(必须会判断的"不是")
题目:$U=\{(x,y,z)\in\mathbb{R}^3:x+y+z=1\}$ 是不是子空间?
快速解答:
代入零向量:$(0,0,0)$ 的坐标和是 $0+0+0=0\ne1$。
零向量不在集合中,所以 $U$ 不是子空间。(第一步就否定,无需继续检查)
记住规律:看到 $=1, =5$ 这种非零常数的等式,99%不是子空间。
例题 2:矩阵空间的子空间判断
题目:$M=\left\{\begin{pmatrix}a&b\\0&0\end{pmatrix}:a,b\in\mathbb{R}\right\}$ 是否为 $\mathbb{R}^{2\times2}$ 的子空间?
解答:
- 零矩阵 $\begin{pmatrix}0&0\\0&0\end{pmatrix}$ 满足形式,$\vec{0}\in M$。✓
- 两个这样的矩阵相加,第二行还是0,仍在 $M$ 中。✓
- 数乘后第二行仍然是0,仍在 $M$ 中。✓
- 所以 $M$ 是子空间。
几何意义:$M$ 就是"第二行为零"的所有矩阵,这是 $\mathbb{R}^{2\times2}$ 的一个子空间。
反例 2:第一象限不是子空间(几何反例)
题目:$\mathbb{R}^2$ 的第一象限 $Q=\{(x,y):x>0,y>0\}$ 是否为子空间?
解答:
零向量 $(0,0)$ 不满足 $x>0, y>0$(因为 $0$ 不大于 $0$)。
所以 $Q$ 不是子空间。
另一个角度:即使放宽条件变成 $x\geq0,y\geq0$(第一象限加坐标轴),也不是子空间,因为数乘不封闭(乘以 $-1$ 就跑到第三象限了)。
例题 3:多项式空间的子空间(难度稍高)
题目:$P=\{p(x)\in\mathbb{R}[x]_3:p(1)=0\}$(所有在 $x=1$ 处为零的次数 $\leq3$ 的多项式),是否为子空间?
解答:
- 零多项式 $p(x)=0$ 满足 $p(1)=0$,$\vec{0}\in P$。✓
- 若 $p(1)=0, q(1)=0$,则 $(p+q)(1)=p(1)+q(1)=0+0=0$,加法封闭。✓
- 若 $p(1)=0$,则 $(kp)(1)=k\cdot p(1)=k\cdot0=0$,数乘封闭。✓
- 所以 $P$ 是子空间。
重要规律:"满足某个齐次线性条件的对象全体"通常是子空间。
快速判断技巧总结(考场省时间)
| 条件特征 | 是否子空间 | 例子 |
| 齐次线性方程组的解集 | ✓ 一定是 | $x+y=0$ |
| 非齐次方程组的解集 | ✗ 一定不是 | $x+y=1$ |
| 向量组的所有线性组合(span) | ✓ 一定是 | $\text{span}\{(1,0),(0,1)\}$ |
| 要求某分量>0或<0(严格不等式) | ✗ 通常不是 | $x>0$ |
| 要求范数、长度=1 | ✗ 一定不是 | $\|\alpha\|=1$ |
| 满足齐次线性条件 | ✓ 可能是 | $p(0)=0$ |
考试常见陷阱:
❌ "所有可逆矩阵"不是子空间(零矩阵不可逆)
❌ "所有行列式为1的矩阵"不是子空间(零矩阵行列式为0)
❌ "所有单位向量"不是子空间(零向量长度为0)
✓ "所有行列式为0的矩阵"可能是(要具体验证,零矩阵在里面是好兆头)
立即练习(判断题最容易拿分)
练习1:$W=\{(x,y,z):2x-y+3z=0\}$ 是否为 $\mathbb{R}^3$ 的子空间?
点击查看答案
是子空间。
理由:齐次线性方程的解集一定是子空间(三步验证都能通过)。
练习2:$U=\{(x,y):xy=0\}$ 是否为 $\mathbb{R}^2$ 的子空间?
点击查看详细解答
不是子空间。
反例:$(1,0)\in U$(因为 $1\times0=0$),$(0,1)\in U$(因为 $0\times1=0$)
但 $(1,0)+(0,1)=(1,1)$,而 $1\times1=1\ne0$,所以 $(1,1)\notin U$
加法不封闭,所以不是子空间。
练习3:所有对称矩阵构成的集合是否为矩阵空间的子空间?
点击查看答案
是子空间。
理由:零矩阵是对称的✓,两个对称矩阵相加还是对称的✓,对称矩阵数乘还是对称的✓
练习4(陷阱题):$P=\{(x,y,z):x^2+y^2+z^2=0\}$ 是否为子空间?
点击查看详细解答
是子空间!(这是个陷阱题)
因为 $x^2+y^2+z^2=0$ 在实数域下只有一个解:$x=y=z=0$
所以 $P=\{(0,0,0)\}$,只含零向量的集合是子空间(称为零子空间)。
3. 线性相关、基、维数(核心中的核心,必考)
这三个概念的关系(一句话说清楚)
线性无关 = 没有冗余的向量(谁都不能被其他人表示)
基 = 既能生成整个空间,又线性无关的一组向量
维数 = 一组基里向量的个数(任何基的向量个数都相同)
线性相关/无关的定义(必须背下来)
向量组 $\alpha_1,\alpha_2,\dots,\alpha_s$ 线性相关 ⇔ 存在不全为零的数 $k_1,k_2,\dots,k_s$ 使得:
$$k_1\alpha_1 + k_2\alpha_2 + \cdots + k_s\alpha_s = 0$$
线性无关 ⇔ 只有当 $k_1=k_2=\cdots=k_s=0$ 时上式才成立(只有零解)
小白理解(用人话说):
线性相关 = "有人打酱油",某个向量能用其他向量表示出来,是多余的
线性无关 = "人人有用",每个向量都提供了新的方向,谁都不可或缺
考试判断方法(统一做法):
把向量排成矩阵,解齐次方程 $k_1\alpha_1+\cdots+k_s\alpha_s=0$:
• 只有零解 → 线性无关
• 有非零解 → 线性相关
例题 2.1:判断线性相关性(基础题)
题目:判断 $\alpha_1=(1,2,1)$,$\alpha_2=(2,3,3)$,$\alpha_3=(1,1,2)$ 是否线性相关。
完整解答:
- 【列方程】设 $k_1\alpha_1 + k_2\alpha_2 + k_3\alpha_3 = 0$
- 【写成矩阵形式】
把向量按列排列,得到齐次方程组:
$$\begin{pmatrix}1&2&1\\2&3&1\\1&3&2\end{pmatrix}\begin{pmatrix}k_1\\k_2\\k_3\end{pmatrix}=\begin{pmatrix}0\\0\\0\end{pmatrix}$$
- 【行化简】
$$\begin{pmatrix}1&2&1\\2&3&1\\1&3&2\end{pmatrix}\xrightarrow{\text{行化简}}\begin{pmatrix}1&2&1\\0&-1&-1\\0&1&1\end{pmatrix}\xrightarrow{\text{继续}}\begin{pmatrix}1&2&1\\0&1&1\\0&0&0\end{pmatrix}$$
- 【分析解的情况】
秩为2,有3个未知数,所以有 $3-2=1$ 个自由变量。
存在非零解(比如令 $k_3=1$,可得 $k_2=-1, k_1=1$)。
- 【结论】
因为有非零解,所以这三个向量线性相关。
(实际上 $\alpha_1 - \alpha_2 + \alpha_3 = 0$,即 $\alpha_1 = \alpha_2 - \alpha_3$)
快速判断技巧:向量个数 > 维数 → 一定线性相关(3个三维向量最多只能有3个线性无关)
例题 2.2:求极大无关组和维数(必考题型)
题目:$\alpha_1=(1,1,0,0)$,$\alpha_2=(2,2,0,0)$,$\alpha_3=(1,0,1,0)$,$\alpha_4=(0,1,-1,0)$。求生成空间 $W=\text{span}\{\alpha_1,\alpha_2,\alpha_3,\alpha_4\}$ 的一组基和维数。
完整解答(考试标准步骤):
- 【观察明显相关关系】
$\alpha_2 = 2\alpha_1$(第二个是第一个的2倍),所以 $\alpha_2$ 多余,可以删掉。
- 【构造矩阵】
把剩下的向量按列排列:
$$A = \begin{pmatrix} 1 & 1 & 0\\ 1 & 0 & 1\\ 0 & 1 & -1\\ 0 & 0 & 0 \end{pmatrix}$$
(注意:这是 $4\times3$ 矩阵,列是 $\alpha_1,\alpha_3,\alpha_4$)
- 【行化简找主元列】
$$\begin{pmatrix} 1 & 1 & 0\\ 1 & 0 & 1\\ 0 & 1 & -1\\ 0 & 0 & 0 \end{pmatrix}\xrightarrow{r_2-r_1}\begin{pmatrix} 1 & 1 & 0\\ 0 & -1 & 1\\ 0 & 1 & -1\\ 0 & 0 & 0 \end{pmatrix}\xrightarrow{r_3+r_2}\begin{pmatrix} 1 & 1 & 0\\ 0 & -1 & 1\\ 0 & 0 & 0\\ 0 & 0 & 0 \end{pmatrix}$$
主元在第1列和第2列。
- 【找出基】
主元列对应原矩阵的列向量(不是化简后的!)
第1列对应 $\alpha_1$,第2列对应 $\alpha_3$。
一组基为:$\{\alpha_1, \alpha_3\} = \{(1,1,0,0), (1,0,1,0)\}$
- 【维数】
基中有2个向量,所以 $\dim W = 2$。
- 【验证(可选但推荐)】
检查 $\alpha_1$ 和 $\alpha_3$ 是否线性无关:不成倍数 ✓
检查 $\alpha_4$ 能否由它们表示:$\alpha_4 = -\alpha_1 + \alpha_3$ ✓
关键要点:
- ❗ 主元列对应的是原向量,不要写化简后的向量
- ❗ 维数 = 秩 = 主元个数 = 基向量个数
- ❗ 极大无关组不唯一,但维数唯一
求基和维数的万能步骤(背熟这个,所有题都能做)
- Step 1:把向量按列排成矩阵 $A$
- Step 2:对 $A$ 做行化简,化成行最简形或阶梯形
- Step 3:找主元列(每行第一个非零元所在的列)
- Step 4:主元列对应的原矩阵的列向量就是一组基
- Step 5:主元个数 = 秩 = 维数
为什么要按列排列?
因为行化简不改变列向量之间的线性关系。主元列在原矩阵中对应的列向量一定线性无关,且能生成所有列向量。
记忆方法:求"向量组"的基 → 向量放"列"里 → 行化简找主元列
例题 2.3:解空间的基和维数(齐次方程组)
题目:求齐次方程组 $\begin{cases}x_1+2x_2+x_3=0\\2x_1+4x_2+2x_3=0\end{cases}$ 的解空间的基和维数。
完整解答:
- 【化简增广矩阵】
$$\begin{pmatrix}1&2&1\\2&4&2\end{pmatrix}\xrightarrow{r_2-2r_1}\begin{pmatrix}1&2&1\\0&0&0\end{pmatrix}$$
- 【写出通解】
只有一个主元($x_1$),两个自由变量($x_2, x_3$)。
从 $x_1+2x_2+x_3=0$ 得 $x_1=-2x_2-x_3$。
通解:$$X = \begin{pmatrix}x_1\\x_2\\x_3\end{pmatrix} = \begin{pmatrix}-2x_2-x_3\\x_2\\x_3\end{pmatrix} = x_2\begin{pmatrix}-2\\1\\0\end{pmatrix} + x_3\begin{pmatrix}-1\\0\\1\end{pmatrix}$$
- 【找出基】
解空间的一组基为:$$\left\{\begin{pmatrix}-2\\1\\0\end{pmatrix}, \begin{pmatrix}-1\\0\\1\end{pmatrix}\right\}$$
- 【维数】
$\dim(\text{解空间}) = 2$(自由变量个数)
- 【验证】
用秩-零化度公式:$n - \text{rank}(A) = 3 - 1 = 2$ ✓
重要公式:解空间维数 = 未知数个数 - 系数矩阵的秩
常见考点总结
| 题型 | 方法 | 维数公式 |
| 给定向量组求基 | 向量按列排列→行化简→取主元列 | dim = 秩 |
| 齐次方程组解空间 | 求通解→自由变量对应向量 | dim = $n-$秩 |
| 矩阵的列空间 | 对矩阵行化简→主元列 | dim = 列秩 |
| 矩阵的行空间 | 转置后当列处理,或直接取非零行 | dim = 行秩 |
立即练习(必须动手算)
练习1:判断 $(1,0,1)$,$(0,1,1)$,$(1,1,0)$ 是否线性无关。
点击查看详细解答
- 构造矩阵:$\begin{pmatrix}1&0&1\\0&1&1\\1&1&0\end{pmatrix}$
- 计算行列式:$\begin{vmatrix}1&0&1\\0&1&1\\1&1&0\end{vmatrix}=1(0-1)-0+1(0-1)=-1-1=-2\ne0$
- 行列式非零,所以线性无关
技巧:对于 $n$ 个 $n$ 维向量,算行列式最快(非零→线性无关,为零→线性相关)
练习2:$\alpha_1=(1,2,3)$,$\alpha_2=(2,4,6)$,$\alpha_3=(1,1,1)$,求 $\text{span}\{\alpha_1,\alpha_2,\alpha_3\}$ 的基和维数。
点击查看详细解答
- 观察:$\alpha_2=2\alpha_1$(线性相关),删掉 $\alpha_2$
- 检查 $\alpha_1$ 和 $\alpha_3$:不成倍数→线性无关
- 基:$\{\alpha_1, \alpha_3\}=\{(1,2,3), (1,1,1)\}$
- 维数:2
练习3:求 $\begin{cases}x+y+z=0\\2x+2y+2z=0\end{cases}$ 的解空间维数。
点击查看答案
系数矩阵 $\begin{pmatrix}1&1&1\\2&2&2\end{pmatrix}$ 的秩为1(第二行是第一行的2倍)
维数 = $3-1=2$
(通解形式:$x=-y-z$,自由变量 $y,z$ 对应2维)
4. 坐标怎么求(看起来难,其实就是解方程)
坐标的本质(一句话理解)
给定一组基 $\varepsilon_1,\dots,\varepsilon_n$,任何向量 $\alpha$ 都能唯一地写成:
$$\alpha = x_1\varepsilon_1 + x_2\varepsilon_2 + \cdots + x_n\varepsilon_n$$
这些系数 $(x_1, x_2, \dots, x_n)$ 就是 $\alpha$ 在这组基下的坐标。
为什么要研究坐标?
① 同一个向量在不同基下坐标不同(比如 $(1,1)$ 在标准基下是 $(1,1)$,但在其他基下可能是 $(2,3)$)
② 选对基能让计算变简单(比如正交基下的坐标计算超简单)
③ 考试常考"求坐标"和"坐标变换"
考试中的坐标题:90%就是列方程解线性方程组,不要被"坐标"这个词吓到。
求坐标的标准步骤(4步走)
- Step 1:设 $\alpha = x_1\varepsilon_1 + x_2\varepsilon_2 + \cdots + x_n\varepsilon_n$(未知系数)
- Step 2:把向量的具体坐标代入,得到方程组
- Step 3:解方程组,求出 $x_1, x_2, \dots, x_n$
- Step 4:写出坐标 $(x_1, x_2, \dots, x_n)$(注意是列向量形式)
例题 3.1:标准基下求坐标(最简单的情况)
题目:在 $\mathbb{R}^3$ 的标准基 $e_1=(1,0,0), e_2=(0,1,0), e_3=(0,0,1)$ 下,求向量 $\alpha=(2,-3,5)$ 的坐标。
解答:
设 $\alpha = x_1e_1 + x_2e_2 + x_3e_3$
代入:$(2,-3,5) = x_1(1,0,0) + x_2(0,1,0) + x_3(0,0,1) = (x_1, x_2, x_3)$
显然 $x_1=2, x_2=-3, x_3=5$
坐标为:$(2,-3,5)^T$ 或写成 $\begin{pmatrix}2\\-3\\5\end{pmatrix}$
结论:在标准基下,向量的坐标就是它本身的分量。(这也是为什么叫"标准基")
例题 3.2:非标准基下求坐标(必考题型)
题目:在 $\mathbb{R}^2$ 中,基 $\varepsilon_1=(1,1), \varepsilon_2=(1,-1)$。求向量 $\alpha=(3,1)$ 在这组基下的坐标。
完整解答(考试标准格式):
- 【设未知系数】
设 $\alpha = x\varepsilon_1 + y\varepsilon_2$(注意:这里的 $x,y$ 就是要求的坐标)
- 【代入已知向量】
$(3,1) = x(1,1) + y(1,-1)$
- 【展开成分量形式】
$(3,1) = (x+y, x-y)$
- 【列方程组】
$$\begin{cases} x + y = 3\\ x - y = 1 \end{cases}$$
- 【解方程】
两式相加:$2x = 4 \Rightarrow x = 2$
代入第一式:$2 + y = 3 \Rightarrow y = 1$
- 【写出坐标】
$\alpha$ 在基 $\{\varepsilon_1, \varepsilon_2\}$ 下的坐标为 $(2, 1)^T$ 或 $\begin{pmatrix}2\\1\end{pmatrix}$
- 【验证(推荐写)】
检验:$2(1,1) + 1(1,-1) = (2,2)+(1,-1) = (3,1)$ ✓
关键点:
- 坐标 $(2,1)$ 的意思是:$\alpha = 2\varepsilon_1 + 1\varepsilon_2$
- 同一个向量 $(3,1)$ 在标准基下坐标是 $(3,1)$,在这组基下坐标是 $(2,1)$,基不同坐标不同
例题 3.3:矩阵方法求坐标(计算量大时更快)
题目:在 $\mathbb{R}^3$ 中,基 $\varepsilon_1=(1,1,0), \varepsilon_2=(1,0,1), \varepsilon_3=(0,1,1)$。求 $\alpha=(2,3,4)$ 在此基下的坐标。
矩阵方法解答:
- 【建立矩阵方程】
设坐标为 $(x,y,z)^T$,则:
$$\begin{pmatrix}1&1&0\\1&0&1\\0&1&1\end{pmatrix}\begin{pmatrix}x\\y\\z\end{pmatrix}=\begin{pmatrix}2\\3\\4\end{pmatrix}$$
(左边矩阵的列是基向量,右边是目标向量)
- 【增广矩阵化简】
$$\left(\begin{array}{ccc|c} 1&1&0&2\\ 1&0&1&3\\ 0&1&1&4 \end{array}\right) \xrightarrow{r_2-r_1} \left(\begin{array}{ccc|c} 1&1&0&2\\ 0&-1&1&1\\ 0&1&1&4 \end{array}\right)$$
$$\xrightarrow{r_3+r_2} \left(\begin{array}{ccc|c} 1&1&0&2\\ 0&-1&1&1\\ 0&0&2&5 \end{array}\right)$$
- 【回代求解】
从第三行:$2z=5 \Rightarrow z=\frac{5}{2}$
从第二行:$-y+z=1 \Rightarrow y=z-1=\frac{5}{2}-1=\frac{3}{2}$
从第一行:$x+y=2 \Rightarrow x=2-\frac{3}{2}=\frac{1}{2}$
- 【写出坐标】
坐标为 $\begin{pmatrix}\frac{1}{2}\\\frac{3}{2}\\\frac{5}{2}\end{pmatrix}$
- 【验证】
$\frac{1}{2}(1,1,0)+\frac{3}{2}(1,0,1)+\frac{5}{2}(0,1,1)$
$=(\frac{1}{2},\frac{1}{2},0)+(\frac{3}{2},0,\frac{3}{2})+(0,\frac{5}{2},\frac{5}{2})$
$=(2,3,4)$ ✓
方法选择:
- 2维、3维简单基 → 直接列方程更快
- 3维复杂基、4维及以上 → 用矩阵方法
例题 3.4:多项式空间的坐标(抽象空间也是一样的套路)
题目:在 $\mathbb{R}[x]_2$ 中,基 $\varepsilon_1=1, \varepsilon_2=x, \varepsilon_3=x^2$。求 $p(x)=2+3x-x^2$ 的坐标。
解答:
设 $p(x) = a\cdot1 + b\cdot x + c\cdot x^2$
则 $2+3x-x^2 = a + bx + cx^2$
比较系数:$a=2, b=3, c=-1$
坐标为 $(2, 3, -1)^T$
规律:在多项式的标准基 $\{1, x, x^2, \dots\}$ 下,坐标就是系数。
坐标变换公式(了解即可,考试较少)
如果向量 $\alpha$ 在基 $\{\varepsilon_1,\dots,\varepsilon_n\}$ 下坐标为 $X$,在基 $\{\eta_1,\dots,\eta_n\}$ 下坐标为 $Y$,则:
$$X = PY$$
其中 $P$ 是过渡矩阵(从新基到旧基),$P$ 的第 $j$ 列是 $\eta_j$ 在旧基下的坐标。
考试建议:如果遇到坐标变换,直接从定义出发列方程更保险。
立即练习
练习1:在 $\mathbb{R}^2$ 中,基 $\varepsilon_1=(1,2), \varepsilon_2=(2,3)$,求 $\alpha=(5,8)$ 的坐标。
点击查看详细解答
- 设 $\alpha = x\varepsilon_1 + y\varepsilon_2$
- $(5,8) = x(1,2) + y(2,3) = (x+2y, 2x+3y)$
- 方程组:$\begin{cases}x+2y=5\\2x+3y=8\end{cases}$
- 解得:$x=-1, y=3$(第一式×2-第二式:$y=2$... 重算:$x=5-2\times3=-1$ ✗)
- 正解:$2x+3y=8$ 和 $x+2y=5$,第二式×2:$2x+4y=10$,相减得 $y=2$,代入得 $x=1$
- 坐标为 $(1, 2)^T$
练习2:在 $\mathbb{R}^3$ 标准基下,$(2,-1,3)$ 的坐标是多少?
点击查看答案
$(2,-1,3)^T$
标准基下坐标就是向量本身。
5. 子空间的和、交、直和(计算题常考,必须掌握维数公式)
三个概念的直观理解
| 概念 | 定义 | 直观理解 | 几何例子 |
| 和 $U+V$ | $\{u+v: u\in U, v\in V\}$ | 两个空间"拼起来"能覆盖的范围 | $x$ 轴 + $y$ 轴 = 整个平面 |
| 交 $U\cap V$ | $\{\alpha: \alpha\in U \text{ 且 } \alpha\in V\}$ | 两个空间的"公共部分" | 两条不重合直线的交 = 原点 |
| 直和 $U\oplus V$ | $U+V$ 且 $U\cap V=\{0\}$ | 两个空间"独立拼接",没有重叠 | $x$ 轴 ⊕ $y$ 轴(只在原点相交) |
维数公式(必须背熟,考试必考)
$$\boxed{\dim(U+V) = \dim U + \dim V - \dim(U\cap V)}$$
类比记忆:就像集合的容斥原理 $|A\cup B| = |A| + |B| - |A\cap B|$
意义:两个空间的维数加起来,要减去"重复计算"的交集部分。
直和的等价条件(选择题常考)
以下条件等价(任意一个成立,其他都成立):
① $V = U\oplus W$
② $V = U + W$ 且 $U\cap W = \{0\}$
③ $V = U + W$ 且 $\dim V = \dim U + \dim W$
④ $V$ 中每个向量都能唯一地表示为 $u+w$($u\in U, w\in W$)
考试技巧:证明直和时,通常用②或③最方便。
例题 4.1:求子空间的和(基础题)
题目:在 $\mathbb{R}^3$ 中,$U=\text{span}\{(1,0,0)\}$,$V=\text{span}\{(0,1,0)\}$。求 $U+V$。
解答:
- 【理解定义】
$U+V$ 是所有 $u+v$ 的集合,其中 $u\in U, v\in V$
- 【具体计算】
$u = a(1,0,0) = (a,0,0)$,$v = b(0,1,0) = (0,b,0)$
$u+v = (a,b,0)$
- 【写成生成空间】
$U+V = \{(a,b,0): a,b\in\mathbb{R}\} = \text{span}\{(1,0,0), (0,1,0)\}$
- 【几何意义】
$U$ 是 $x$ 轴,$V$ 是 $y$ 轴,$U+V$ 是 $xy$ 平面($z=0$)
- 【求维数】
一组基为 $\{(1,0,0), (0,1,0)\}$,所以 $\dim(U+V)=2$
验证维数公式:$\dim(U+V)=1+1-0=2$ ✓(交集只有原点,维数为0)
例题 4.2:求子空间的交(重点题型)
题目:$U=\{(x,y,z):x+y+z=0\}$,$V=\{(x,y,z):x-y=0\}$。求 $U\cap V$ 的基和维数。
完整解答:
- 【理解交的含义】
$U\cap V$ 是同时满足两个条件的向量
- 【列方程组】
$(x,y,z)\in U\cap V$ 当且仅当:
$$\begin{cases} x+y+z=0 &\text{(属于 }U\text{)}\\ x-y=0 &\text{(属于 }V\text{)} \end{cases}$$
- 【解方程组】
从第二个方程:$x=y$
代入第一个:$y+y+z=0 \Rightarrow z=-2y$
令 $y=t$(自由变量),则 $x=t, z=-2t$
通解:$(x,y,z) = (t, t, -2t) = t(1, 1, -2)$
- 【写出基】
$U\cap V$ 的一组基为 $\{(1,1,-2)\}$
维数:$\dim(U\cap V)=1$
- 【验证维数公式】
$\dim U = 2$(齐次方程1个,3个变量,$3-1=2$)
$\dim V = 2$(齐次方程1个,3个变量,$3-1=2$)
$\dim(U\cap V) = 1$(已求出)
用公式算 $U+V$ 的维数:$\dim(U+V)=2+2-1=3$
因为 $U,V\subseteq\mathbb{R}^3$ 且 $\dim(U+V)=3$,所以 $U+V=\mathbb{R}^3$ ✓
关键技巧:求交集 = 联立方程组求公共解
例题 4.3:判断直和(必考题型)
题目:在 $\mathbb{R}^2$ 中,$U=\text{span}\{(1,0)\}$,$V=\text{span}\{(0,1)\}$。判断 $\mathbb{R}^2=U\oplus V$ 是否成立。
方法一:验证交集为零
- $U$ 是 $x$ 轴,$V$ 是 $y$ 轴
- $U\cap V$ 只包含同时在 $x$ 轴和 $y$ 轴上的向量,只有 $(0,0)$
- 所以 $U\cap V=\{0\}$ ✓
- $\dim(U+V)=1+1-0=2=\dim\mathbb{R}^2$,所以 $U+V=\mathbb{R}^2$ ✓
- 结论:$\mathbb{R}^2=U\oplus V$ 成立
方法二:验证维数
- $\dim U=1, \dim V=1, \dim\mathbb{R}^2=2$
- $\dim U+\dim V=1+1=2=\dim\mathbb{R}^2$ ✓
- 且 $(1,0)$ 和 $(0,1)$ 能生成 $\mathbb{R}^2$ ✓
- 结论:$\mathbb{R}^2=U\oplus V$ 成立
考试建议:方法二更快,直接算维数。
例题 4.4:用维数公式求交的维数(不求具体基)
题目:$V$ 是5维空间,$U,W$ 是 $V$ 的子空间,$\dim U=3, \dim W=4$,且 $U+W=V$。求 $\dim(U\cap W)$。
解答:
- 【用维数公式】
$$\dim(U+W) = \dim U + \dim W - \dim(U\cap W)$$
- 【代入已知数据】
$$5 = 3 + 4 - \dim(U\cap W)$$
- 【解方程】
$$\dim(U\cap W) = 3+4-5 = 2$$
- 【答案】
$\dim(U\cap W)=2$
考试技巧:这种题不需要求具体的基,只算维数即可。维数公式是送分题!
例题 4.5:证明直和(证明题模板)
题目:设 $U,V$ 是线性空间 $W$ 的子空间,$U\cap V=\{0\}$,$\dim U+\dim V=\dim W$。证明 $W=U\oplus V$。
标准证明:
- 【证明 $U+V=W$】
由维数公式:
$$\dim(U+V) = \dim U + \dim V - \dim(U\cap V) = \dim U + \dim V - 0 = \dim W$$
因为 $U+V\subseteq W$ 且维数相等,所以 $U+V=W$。
- 【已知 $U\cap V=\{0\}$】
由题目条件。
- 【结论】
因为 $W=U+V$ 且 $U\cap V=\{0\}$,所以 $W=U\oplus V$。
证明要点:直和的证明通常就是验证"和等于大空间"+"交只有零"。
解题策略总结
| 题目要求 | 解题方法 | 核心工具 |
| 求 $U+V$ 的基 | 把 $U$ 和 $V$ 的基向量合并,再求极大无关组 | 行化简 |
| 求 $U\cap V$ 的基 | 联立两个子空间的定义方程,求通解 | 解方程组 |
| 判断是否直和 | 验证 $U\cap V=\{0\}$ 或验证 $\dim(U+V)=\dim U+\dim V$ | 维数公式 |
| 只求维数 | 直接用维数公式计算 | $\dim(U+V)=\dim U+\dim V-\dim(U\cap V)$ |
常见考试陷阱:
❌ 错误1:以为 $U+V$ 就是 $U\cup V$(并集)
→ 正确:$U+V$ 是所有 $u+v$ 的和,不是简单并集
❌ 错误2:以为直和就是"维数相加"
→ 正确:还要验证交集为零(或者和等于大空间)
❌ 错误3:维数公式记错成 $\dim(U+V)=\dim U+\dim V$
→ 正确:要减去交集维数
立即练习
练习1:$U=\text{span}\{(1,0,1)\}$,$V=\text{span}\{(0,1,1)\}$,求 $\dim(U+V)$ 和 $\dim(U\cap V)$。
点击查看详细解答
- $(1,0,1)$ 和 $(0,1,1)$ 不成倍数,线性无关
- $U+V=\text{span}\{(1,0,1),(0,1,1)\}$,$\dim(U+V)=2$
- $\dim U=1, \dim V=1$
- 由维数公式:$2=1+1-\dim(U\cap V)$,所以 $\dim(U\cap V)=0$
- 即 $U\cap V=\{0\}$(两条直线只在原点相交)
练习2:在 $\mathbb{R}^4$ 中,$\dim U=2, \dim V=3$,$\dim(U\cap V)=1$。求 $\dim(U+V)$。
点击查看答案
$\dim(U+V)=2+3-1=4$
因为 $U+V\subseteq\mathbb{R}^4$ 且 $\dim(U+V)=4$,所以 $U+V=\mathbb{R}^4$
练习3:$U=\{(x,y,z):x=0\}$,$V=\{(x,y,z):y=0\}$。$\mathbb{R}^3=U\oplus V$ 是否成立?
点击查看详细解答
- $U$ 是 $yz$ 平面,$\dim U=2$
- $V$ 是 $xz$ 平面,$\dim V=2$
- $U\cap V=\{(x,y,z):x=0 \text{ 且 } y=0\}=\{(0,0,z)\}$ 是 $z$ 轴,$\dim(U\cap V)=1$
- $\dim(U+V)=2+2-1=3$,所以 $U+V=\mathbb{R}^3$
- 但 $U\cap V\ne\{0\}$(交集是整条 $z$ 轴)
- 不成立,因为交集不是零空间
第六章综合训练(线性空间大题必练)
综合题1:完整的线性空间大题流程
题目:在 $\mathbb{R}^4$ 中,$U=\{(x_1,x_2,x_3,x_4): x_1+x_2=0, x_3+x_4=0\}$。
(1)证明 $U$ 是 $\mathbb{R}^4$ 的子空间;
(2)求 $U$ 的一组基和维数;
(3)将 $(1,-1,2,-2)$ 表示为 $U$ 中基向量的线性组合。
点击查看完整解答
(1)证明 $U$ 是子空间:
- 零向量:$(0,0,0,0)$ 满足 $0+0=0$ 和 $0+0=0$,所以 $\vec{0}\in U$ ✓
- 加法封闭:设 $\alpha=(a_1,a_2,a_3,a_4)\in U$,$\beta=(b_1,b_2,b_3,b_4)\in U$
则 $a_1+a_2=0, a_3+a_4=0, b_1+b_2=0, b_3+b_4=0$
$\alpha+\beta=(a_1+b_1, a_2+b_2, a_3+b_3, a_4+b_4)$
检查:$(a_1+b_1)+(a_2+b_2)=(a_1+a_2)+(b_1+b_2)=0+0=0$ ✓
同理 $(a_3+b_3)+(a_4+b_4)=0$ ✓
- 数乘封闭:若 $\alpha\in U$,则 $k\alpha=(ka_1,ka_2,ka_3,ka_4)$
$ka_1+ka_2=k(a_1+a_2)=k\cdot0=0$ ✓
- 结论:$U$ 是 $\mathbb{R}^4$ 的子空间。
(2)求基和维数:
- 从方程组 $\begin{cases}x_1+x_2=0\\x_3+x_4=0\end{cases}$ 得:$x_2=-x_1, x_4=-x_3$
- 令 $x_1=s, x_3=t$(自由变量),则:
$(x_1,x_2,x_3,x_4)=(s,-s,t,-t)=s(1,-1,0,0)+t(0,0,1,-1)$
- 一组基:$\{(1,-1,0,0), (0,0,1,-1)\}$
- 维数:$\dim U=2$
- 验证:4个变量-2个方程=2维 ✓
(3)表示为线性组合:
- 先验证 $(1,-1,2,-2)\in U$:$1+(-1)=0$ ✓,$2+(-2)=0$ ✓
- 设 $(1,-1,2,-2)=a(1,-1,0,0)+b(0,0,1,-1)$
- 比较坐标:$a=1, b=2$
- $(1,-1,2,-2)=1\cdot(1,-1,0,0)+2\cdot(0,0,1,-1)$
综合题2:维数公式应用
题目:$V$ 是6维空间,$U_1,U_2,U_3$ 是 $V$ 的子空间,$\dim U_1=\dim U_2=\dim U_3=4$。证明 $U_1\cap U_2\cap U_3\ne\{0\}$。
点击查看详细解答
- 先考虑 $U_1\cap U_2$:
$\dim(U_1+U_2)=\dim U_1+\dim U_2-\dim(U_1\cap U_2)$
因为 $U_1+U_2\subseteq V$,所以 $\dim(U_1+U_2)\leq 6$
$\dim(U_1\cap U_2)=4+4-\dim(U_1+U_2)\geq 4+4-6=2$
- 设 $W=U_1\cap U_2$,考虑 $W\cap U_3$:
$\dim W\geq 2, \dim U_3=4$
$\dim(W+U_3)=\dim W+\dim U_3-\dim(W\cap U_3)\leq 6$
$\dim(W\cap U_3)\geq \dim W+4-6\geq 2+4-6=0$
- 但这还不够强,需要更精确估计:
实际上 $\dim(W\cap U_3)\geq 2+4-6=0$ 不能保证非零
改用:$\dim(U_1\cap U_2)\geq 2$,$\dim(U_1\cap U_2)+\dim U_3\geq 2+4=6$
在6维空间中两个子空间维数和≥6,必有非零交
- 结论:$U_1\cap U_2\cap U_3\ne\{0\}$
关键思想:高维空间中多个大维数子空间必有交集(”鸽巢原理”)
这一章最低要会什么(60分保命清单)
必须100%掌握(占第六章80%分值):
- ✅ 判断子空间(零、加、乘三步,齐次方程解集一定是)
- ✅ 判断线性相关/无关(解齐次方程,只有零解→无关)
- ✅ 求基和维数(向量按列排列→行化简→主元列对应原向量)
- ✅ 会用维数公式 $\dim(U+V)=\dim U+\dim V-\dim(U\cap V)$
- ✅ 求坐标(列方程 $\alpha=x_1\varepsilon_1+\cdots$,解方程组)
争取掌握(冲70-80分):
- ◐ 求子空间的交(联立方程组求公共解)
- ◐ 判断直和(验证交为零或维数相加)
- ◐ 解空间的基(通解中自由变量对应的向量)
- ◐ 会算极大无关组(不只是明显的相关关系)
常见失分点(考前再看一遍):
- ❌ 非齐次条件($x+y=1$)判断成子空间
- ❌ 行化简后取化简后的列向量当基(要取原向量!)
- ❌ 维数公式忘记减去交集维数
- ❌ 求坐标时忘记写成列向量形式
- ❌ 线性相关和线性无关的定义记反
- ❌ 以为直和就是维数相加(还要交为零)
第六章核心公式速查(考前必背)
- 维数公式:$\dim(U+V)=\dim U+\dim V-\dim(U\cap V)$
- 秩-零化度:解空间维数 = $n-\text{rank}(A)$
- 基的个数:任何基的向量个数 = 维数(唯一)
- 线性无关:$k_1\alpha_1+\cdots+k_s\alpha_s=0$ 只有零解
- 直和条件:$V=U\oplus W \Leftrightarrow U\cap W=\{0\}$ 且 $\dim V=\dim U+\dim W$
Chapter 7
第七章 线性变换
线性变换就是“保持线性组合结构的函数”。考试里它通常会变成矩阵题:核、像、矩阵表示、特征值、对角化。
过关知识清单:线性变换的考试主线 必考
Hook:线性变换看起来像抽象函数,但考试一落地,基本就是矩阵乘向量、解方程、求特征值。
线性变换题 = 核像维数 + 基下矩阵 + 特征值对角化。这章是高代后半段最容易出综合题的地方。
Why:核告诉你哪些向量被压成 0,像告诉你变换能到哪里,特征值告诉你哪些方向被变换后仍保持方向。它们合起来就是老师最爱考的结构信息。
What:核是 $\ker T=\{\alpha:T\alpha=0\}$;像是 $\operatorname{Im}T=\{T\alpha\}$;可对角化等价于能找到足够多线性无关的特征向量。
How:矩阵形式下,求核解 $AX=0$,求像找列空间;求基下矩阵时,第 $j$ 列永远是 $T(\varepsilon_j)$ 的坐标;判断对角化时,统计各特征空间维数之和是否等于 $n$。
易错:重特征值不一定不可对角化。真正要看的是特征空间维数够不够,不是只看特征值个数。
Checkpoint:$T(X)=AX$ 且 $A$ 是 $3\times3$ 矩阵,若 $\operatorname{rank}A=2$,$\dim\ker T$ 是多少?
参考答案
$\dim\ker T=3-2=1$。用秩-零化度公式:定义域维数 = 核维数 + 像维数。1. 线性变换怎么理解(抽象概念具体化)
线性变换的三个层次理解
层次1 - 定义(必须背):
如果 $T: V\to W$ 满足:
$$T(\alpha+\beta)=T\alpha+T\beta,\quad T(k\alpha)=kT\alpha$$
就是线性变换。
层次2 - 直观理解:
线性变换是”保持线性结构的映射”。通俗说:
- ”加法”变换后还是”加法”:$T(\alpha+\beta)=T\alpha+T\beta$
- ”倍数”变换后还是”倍数”:$T(2\alpha)=2T\alpha$
- 不会出现 $x^2$、$\sin x$、$xy$ 这种非线性操作
层次3 - 考试视角:
90%的线性变换题都是矩阵乘法 $T(X)=AX$,所以:
- 求核 → 解 $AX=0$
- 求像 → 找列空间
- 求矩阵表示 → 算 $T(\varepsilon_j)$ 的坐标
线性变换的基本性质(推论,不用背但要会用):
① $T(\vec{0})=\vec{0}$(零向量变成零向量)
② $T(-\alpha)=-T\alpha$(负号可以提出来)
③ $T(k_1\alpha_1+\cdots+k_n\alpha_n)=k_1T\alpha_1+\cdots+k_nT\alpha_n$(线性组合可以”拆开”变换)
判断是否线性变换:只需验证 $T(\alpha+\beta)=T\alpha+T\beta$ 和 $T(k\alpha)=kT\alpha$
例题 0.1:判断是否为线性变换
题目:判断下列映射是否为线性变换:
(1)$T: \mathbb{R}^2\to\mathbb{R}^2$,$T(x,y)=(x+y, 2x-y)$
点击查看解答
是线性变换。
验证:设 $\alpha=(x_1,y_1), \beta=(x_2,y_2)$
$T(\alpha+\beta)=T(x_1+x_2, y_1+y_2)=((x_1+x_2)+(y_1+y_2), 2(x_1+x_2)-(y_1+y_2))$
$T\alpha+T\beta=(x_1+y_1,2x_1-y_1)+(x_2+y_2,2x_2-y_2)=(x_1+x_2+y_1+y_2, 2x_1+2x_2-y_1-y_2)$ ✓
数乘同理可验证 ✓
(2)$T: \mathbb{R}^2\to\mathbb{R}$,$T(x,y)=xy$
点击查看解答
不是线性变换。
反例:$T(1,1)=1$,但 $T(2(1,1))=T(2,2)=4\ne2\cdot1=2T(1,1)$ ✗
(数乘不满足)
(3)$T: \mathbb{R}^2\to\mathbb{R}^2$,$T(x,y)=(x+1, y)$
点击查看解答
不是线性变换。
因为 $T(\vec{0})=T(0,0)=(1,0)\ne\vec{0}$ ✗
(线性变换必须把零向量变成零向量)
(4)$T: \mathbb{R}^{2\times2}\to\mathbb{R}^{2\times2}$,$T(A)=A^T$(转置)
点击查看解答
是线性变换。
因为 $(A+B)^T=A^T+B^T$ 且 $(kA)^T=kA^T$ ✓
快速判断技巧
| 变换形式 | 是否线性 | 例子 |
| 矩阵乘法 $T(X)=AX$ | ✓ 一定是 | $T(x,y)=(2x+y, x-3y)$ |
| 求导 $T(f)=f'$ | ✓ 是 | $(f+g)'=f'+g'$ |
| 积分 $T(f)=\int f$ | ✓ 是 | $\int(f+g)=\int f+\int g$ |
| 有常数项 $+c$ | ✗ 不是 | $T(x,y)=(x+1,y)$ |
| 有乘积 $xy$, $x^2$ | ✗ 不是 | $T(x,y)=xy$ |
| 有非线性函数 | ✗ 不是 | $T(x)=\sin x$, $T(x)=e^x$ |
2. 核和像(必考重点,必须100%掌握)
核和像的定义(必须背下来)
$$\ker T = \{\alpha\in V: T\alpha=0\} \quad \text{(核:被压成零的向量)}$$ $$\operatorname{Im} T = \{T\alpha: \alpha\in V\} \quad \text{(像:所有可能的输出)}$$
几何直观理解:
核(kernel):想象一个"压缩机",核就是被压扁成零的那些东西。核越大,丢失的信息越多。
像(image):想象一个"投影仪",像就是墙上能投出来的所有图案。像越大,变换能覆盖的范围越广。
核心关系:核大 ⇔ 像小(丢失信息多 ⇔ 输出范围小)
秩-零化度定理(必须背,考试必考)
$$\boxed{\dim V = \dim\ker T + \dim\operatorname{Im} T}$$
中文:定义域维数 = 核的维数 + 像的维数
又称:维数 = 零化度 + 秩
记忆:输入维数 = 被压成0的维数 + 有效输出的维数
矩阵形式下的标准解法(考试就用这个)
如果 $T(X)=AX$($A$ 是 $m\times n$ 矩阵),则:
| 问题 | 方法 | 维数公式 |
| 求 $\ker T$ | 解齐次方程 $AX=0$,通解中自由变量对应的向量就是核的基 | $\dim\ker T = n - \text{rank}(A)$ |
| 求 $\operatorname{Im} T$ | $A$ 的列空间,行化简找主元列对应的原列向量 | $\dim\operatorname{Im} T = \text{rank}(A)$ |
| 验算 | 检查秩-零化度公式 | $n = \dim\ker T + \dim\operatorname{Im} T$ |
例题 1.1:标准的核像计算(必须会做)
题目:$A=\begin{pmatrix}1&2\\2&4\end{pmatrix}$,$T(X)=AX$。求 $\ker T$ 和 $\operatorname{Im} T$ 的基和维数。
完整解答:
- 【求核 $\ker T$】
解 $AX=0$,设 $X=\begin{pmatrix}x\\y\end{pmatrix}$
$$\begin{pmatrix}1&2\\2&4\end{pmatrix}\begin{pmatrix}x\\y\end{pmatrix}=\begin{pmatrix}0\\0\end{pmatrix}$$
方程组:$\begin{cases}x+2y=0\\2x+4y=0\end{cases}$
第二个方程是第一个的2倍,实际只有一个独立方程。
从 $x+2y=0$ 得 $x=-2y$
令 $y=t$(自由变量),则 $X=\begin{pmatrix}-2t\\t\end{pmatrix}=t\begin{pmatrix}-2\\1\end{pmatrix}$
$\ker T$ 的基:$\left\{\begin{pmatrix}-2\\1\end{pmatrix}\right\}$,$\dim\ker T=1$
- 【求像 $\operatorname{Im} T$】
$A$ 的列向量为 $\alpha_1=\begin{pmatrix}1\\2\end{pmatrix}$,$\alpha_2=\begin{pmatrix}2\\4\end{pmatrix}$
观察:$\alpha_2=2\alpha_1$(第二列是第一列的2倍)
所以列空间就是 $\alpha_1$ 张成的空间
$\operatorname{Im} T$ 的基:$\left\{\begin{pmatrix}1\\2\end{pmatrix}\right\}$,$\dim\operatorname{Im} T=1$
- 【验证秩-零化度公式】
$\dim\mathbb{R}^2 = 2$,$\dim\ker T + \dim\operatorname{Im} T = 1+1=2$ ✓
- 【几何意义】
$T$ 把整个平面压到一条直线上($\operatorname{Im} T$ 是直线),垂直于这条直线的方向被压成0($\ker T$)。
例题 1.2:核为零的情况(单射)
题目:$A=\begin{pmatrix}1&0\\0&1\\1&1\end{pmatrix}$,$T:\mathbb{R}^2\to\mathbb{R}^3$,$T(X)=AX$。求 $\ker T$ 和 $\operatorname{Im} T$。
解答:
- 【求核】
解 $AX=0$:$\begin{pmatrix}1&0\\0&1\\1&1\end{pmatrix}\begin{pmatrix}x\\y\end{pmatrix}=\begin{pmatrix}0\\0\\0\end{pmatrix}$
方程组:$\begin{cases}x=0\\y=0\\x+y=0\end{cases}$
只有零解:$X=\begin{pmatrix}0\\0\end{pmatrix}$
$\ker T=\{0\}$,$\dim\ker T=0$
- 【求像】
两列向量 $\begin{pmatrix}1\\0\\1\end{pmatrix}$ 和 $\begin{pmatrix}0\\1\\1\end{pmatrix}$ 线性无关(不成倍数)
$\operatorname{Im} T$ 的基:$\left\{\begin{pmatrix}1\\0\\1\end{pmatrix}, \begin{pmatrix}0\\1\\1\end{pmatrix}\right\}$,$\dim\operatorname{Im} T=2$
- 【验证】$2=0+2$ ✓
- 【重要性质】$\ker T=\{0\}$ 说明 $T$ 是单射(不同输入一定有不同输出,没有信息丢失)
例题 1.3:像为整个空间的情况(满射)
题目:$A=\begin{pmatrix}1&0&1\\0&1&1\end{pmatrix}$,$T:\mathbb{R}^3\to\mathbb{R}^2$,$T(X)=AX$。求核和像。
解答:
- 【求核】
$\begin{pmatrix}1&0&1\\0&1&1\end{pmatrix}\begin{pmatrix}x\\y\\z\end{pmatrix}=\begin{pmatrix}0\\0\end{pmatrix}$
$\begin{cases}x+z=0\\y+z=0\end{cases}$ → $x=-z, y=-z$
令 $z=t$,则 $X=t\begin{pmatrix}-1\\-1\\1\end{pmatrix}$
$\ker T$ 的基:$\left\{\begin{pmatrix}-1\\-1\\1\end{pmatrix}\right\}$,$\dim\ker T=1$
- 【求像】
两列 $\begin{pmatrix}1\\0\end{pmatrix}, \begin{pmatrix}0\\1\end{pmatrix}$ 就是 $\mathbb{R}^2$ 的标准基
$\operatorname{Im} T=\mathbb{R}^2$,$\dim\operatorname{Im} T=2$
- 【验证】$3=1+2$ ✓
- 【重要性质】$\operatorname{Im} T=\mathbb{R}^2$ 说明 $T$ 是满射(任何输出都能找到对应输入)
例题 1.4:只知道矩阵的秩,求核和像的维数
题目:$T:\mathbb{R}^5\to\mathbb{R}^4$,$T(X)=AX$,$\text{rank}(A)=3$。求 $\dim\ker T$ 和 $\dim\operatorname{Im} T$。
解答(不需要具体计算,直接用公式):
- $A$ 是 $4\times5$ 矩阵($m\times n$)
- $\dim\operatorname{Im} T = \text{rank}(A) = 3$
- $\dim\ker T = n - \text{rank}(A) = 5-3=2$
- 验证:$5=2+3$ ✓
考试技巧:这种题不需要算具体的基,只算维数即可。
核和像的重要性质(选择题可能考)
- 核一定是子空间:$\ker T$ 总是 $V$ 的子空间(零向量在里面,加法数乘封闭)
- 像一定是子空间:$\operatorname{Im} T$ 总是 $W$ 的子空间
- 单射 ⇔ 核为零:$T$ 是单射(一对一)当且仅当 $\ker T=\{0\}$
- 满射 ⇔ 像为全空间:$T$ 是满射(onto)当且仅当 $\operatorname{Im} T=W$
- 可逆 ⇔ 单且满:$T$ 可逆当且仅当既单又满,即 $\ker T=\{0\}$ 且 $\operatorname{Im} T=W$
常见错误警告:
❌ 错误1:把核当成"零向量"(核是一个子空间,可能包含很多向量)
❌ 错误2:像的基用化简后的列向量(要用原矩阵的列)
❌ 错误3:算完核和像忘记验证秩-零化度公式
✓ 正确做法:求完核和像后,立即验证维数和是否等于定义域维数
立即练习
练习1:$A=\begin{pmatrix}1&1&0\\0&0&0\end{pmatrix}$,$T(X)=AX$。求 $\dim\ker T$ 和 $\dim\operatorname{Im} T$。
点击查看详细解答
- $\text{rank}(A)=1$(只有一个非零行)
- $\dim\operatorname{Im} T=1$
- $\dim\ker T=3-1=2$
- 验证:$3=2+1$ ✓
练习2:$T:\mathbb{R}^4\to\mathbb{R}^3$,$\dim\ker T=1$。求 $\dim\operatorname{Im} T$。
点击查看答案
$\dim\operatorname{Im} T=4-1=3$
(因为 $\operatorname{Im} T\subseteq\mathbb{R}^3$ 且维数为3,所以 $\operatorname{Im} T=\mathbb{R}^3$,$T$ 是满射)
练习3:$T:\mathbb{R}^n\to\mathbb{R}^n$,若 $T$ 可逆,则 $\ker T=$?
点击查看答案
$\ker T=\{0\}$
因为可逆 → 单射 → 核为零
3. 线性变换在一组基下的矩阵(最容易卡壳的知识点)
核心原理(理解这个就不会混)
给定线性变换 $T: V\to V$ 和 $V$ 的一组基 $\{\varepsilon_1,\varepsilon_2,\dots,\varepsilon_n\}$,$T$ 在这组基下的矩阵 $A$ 满足:
$$\boxed{A\text{ 的第 }j\text{ 列 } = T(\varepsilon_j)\text{ 在这组基下的坐标}}$$
通俗说:矩阵的每一列告诉你"第 $j$ 个基向量变换后是什么"。
为什么是这样?(理解原理)
因为任何向量 $\alpha$ 都能写成基的线性组合:$\alpha=x_1\varepsilon_1+\cdots+x_n\varepsilon_n$
变换后:$T\alpha=x_1T\varepsilon_1+\cdots+x_nT\varepsilon_n$(线性性质)
如果知道每个 $T\varepsilon_j$ 是什么,就能算出任何 $T\alpha$
而矩阵乘法 $AX$($X$ 是坐标列向量)恰好就是在做这个线性组合!
考试中:不需要理解原理,只需要记住"第 $j$ 列 = $T(\varepsilon_j)$ 的坐标"
求矩阵表示的标准步骤(5步走)
- Step 1:明确基 $\{\varepsilon_1,\varepsilon_2,\dots,\varepsilon_n\}$
- Step 2:逐个计算 $T(\varepsilon_1), T(\varepsilon_2), \dots, T(\varepsilon_n)$
- Step 3:把每个 $T(\varepsilon_j)$ 表示成基向量的线性组合
- Step 4:线性组合的系数就是第 $j$ 列的坐标
- Step 5:把所有列拼成矩阵
例题 2.1:标准基下的矩阵(最简单情况)
题目:在 $\mathbb{R}^2$ 的标准基 $e_1=(1,0), e_2=(0,1)$ 下,$T(x,y)=(x+y, y)$。求 $T$ 的矩阵表示。
完整解答:
- 【计算 $T(e_1)$】
$T(e_1)=T(1,0)=(1+0, 0)=(1,0)$
在标准基下,$(1,0)$ 的坐标就是 $(1,0)^T$
第一列:$\begin{pmatrix}1\\0\end{pmatrix}$
- 【计算 $T(e_2)$】
$T(e_2)=T(0,1)=(0+1, 1)=(1,1)$
在标准基下,$(1,1)$ 的坐标就是 $(1,1)^T$
第二列:$\begin{pmatrix}1\\1\end{pmatrix}$
- 【拼成矩阵】
$$A=\begin{pmatrix}1&1\\0&1\end{pmatrix}$$
- 【验证(推荐)】
检验:$A\begin{pmatrix}x\\y\end{pmatrix}=\begin{pmatrix}1&1\\0&1\end{pmatrix}\begin{pmatrix}x\\y\end{pmatrix}=\begin{pmatrix}x+y\\y\end{pmatrix}$ ✓
技巧:标准基下最简单,$T(\varepsilon_j)$ 直接就是坐标,不需要额外计算。
例题 2.2:非标准基下的矩阵(必考题型)
题目:在 $\mathbb{R}^2$ 中,基 $\varepsilon_1=(1,1), \varepsilon_2=(1,-1)$。线性变换 $T$ 满足 $T(x,y)=(2x+y, x-y)$。求 $T$ 在这组基下的矩阵。
完整解答:
- 【计算 $T(\varepsilon_1)$】
$T(\varepsilon_1)=T(1,1)=(2\cdot1+1, 1-1)=(3,0)$
- 【把 $T(\varepsilon_1)$ 表示成基的线性组合】
设 $(3,0)=a\varepsilon_1+b\varepsilon_2=a(1,1)+b(1,-1)$
$(3,0)=(a+b, a-b)$
方程组:$\begin{cases}a+b=3\\a-b=0\end{cases}$ → $a=\frac{3}{2}, b=\frac{3}{2}$
第一列:$\begin{pmatrix}\frac{3}{2}\\\frac{3}{2}\end{pmatrix}$
- 【计算 $T(\varepsilon_2)$】
$T(\varepsilon_2)=T(1,-1)=(2\cdot1-1, 1-(-1))=(1,2)$
- 【把 $T(\varepsilon_2)$ 表示成基的线性组合】
设 $(1,2)=c\varepsilon_1+d\varepsilon_2=c(1,1)+d(1,-1)$
$(1,2)=(c+d, c-d)$
方程组:$\begin{cases}c+d=1\\c-d=2\end{cases}$ → $c=\frac{3}{2}, d=-\frac{1}{2}$
第二列:$\begin{pmatrix}\frac{3}{2}\\-\frac{1}{2}\end{pmatrix}$
- 【写出矩阵】
$$A=\begin{pmatrix}\frac{3}{2}&\frac{3}{2}\\\frac{3}{2}&-\frac{1}{2}\end{pmatrix}$$
关键点:非标准基下,必须把 $T(\varepsilon_j)$ "翻译"成基向量的线性组合,系数才是坐标。
例题 2.3:多项式空间的矩阵表示
题目:在 $\mathbb{R}[x]_2$ 中(次数 $\leq2$ 的多项式),基为 $\{1, x, x^2\}$,求导算子 $D(f)=f'$ 的矩阵表示。
解答:
- 【对每个基向量求导】
- $D(1)=0=0\cdot1+0\cdot x+0\cdot x^2$ → 第一列 $\begin{pmatrix}0\\0\\0\end{pmatrix}$
- $D(x)=1=1\cdot1+0\cdot x+0\cdot x^2$ → 第二列 $\begin{pmatrix}1\\0\\0\end{pmatrix}$
- $D(x^2)=2x=0\cdot1+2\cdot x+0\cdot x^2$ → 第三列 $\begin{pmatrix}0\\2\\0\end{pmatrix}$
- 【矩阵】
$$A=\begin{pmatrix}0&1&0\\0&0&2\\0&0&0\end{pmatrix}$$
- 【验证】
对 $f=a+bx+cx^2$(坐标 $(a,b,c)^T$):
$$A\begin{pmatrix}a\\b\\c\end{pmatrix}=\begin{pmatrix}b\\2c\\0\end{pmatrix}$$
对应多项式 $b+2cx$,正是 $f'$ ✓
规律:求导算子的矩阵是上三角矩阵,对角线全是0(常数求导为0)。
例题 2.4:基变换(相似变换,难度较高)
题目:$T$ 在基 $\{\varepsilon_1,\varepsilon_2\}$ 下的矩阵是 $A=\begin{pmatrix}2&1\\0&3\end{pmatrix}$。求 $T$ 在基 $\{\eta_1,\eta_2\}$ 下的矩阵,其中 $\eta_1=\varepsilon_1, \eta_2=\varepsilon_1+\varepsilon_2$。
方法1:从定义出发(稳)
- 先求 $T(\eta_1)$ 和 $T(\eta_2)$ 在旧基下的表现
- $T(\eta_1)=T(\varepsilon_1)=2\varepsilon_1+0\varepsilon_2$(第一列)
- $T(\eta_2)=T(\varepsilon_1+\varepsilon_2)=T(\varepsilon_1)+T(\varepsilon_2)=(2\varepsilon_1+0\varepsilon_2)+(1\varepsilon_1+3\varepsilon_2)=3\varepsilon_1+3\varepsilon_2$
- 再把它们表示成新基 $\{\eta_1,\eta_2\}$ 的组合(需要解方程)
- ...(计算较复杂)
方法2:用相似变换公式(快,但需要记公式)
如果过渡矩阵 $P$ 满足 $(\varepsilon_1,\varepsilon_2)=(\eta_1,\eta_2)P$,则新矩阵 $B=P^{-1}AP$
考试建议:这种题计算量大,如果时间不够可以跳过。
矩阵表示的重要性质
- 同一个线性变换在不同基下的矩阵不同,但它们相似($B=P^{-1}AP$)
- 相似矩阵有相同的:特征值、行列式、迹、秩
- 标准基下的矩阵最容易算(坐标就是自己)
- 对角矩阵是最"好"的矩阵(对角化的意义)
常见错误警告:
❌ 错误1:把 $T(\varepsilon_j)$ 本身当成第 $j$ 列(要算坐标)
❌ 错误2:在非标准基下忘记"翻译"成基的线性组合
❌ 错误3:基的顺序搞错($\varepsilon_1$ 对应第一列,$\varepsilon_2$ 对应第二列)
✓ 正确做法:标准基→直接写;非标准基→列方程求坐标
立即练习
练习1:在 $\mathbb{R}^2$ 标准基下,$T(x,y)=(2x, 3y)$(伸缩变换)。求矩阵。
点击查看答案
$T(1,0)=(2,0)$ → 第一列 $(2,0)^T$
$T(0,1)=(0,3)$ → 第二列 $(0,3)^T$
$$A=\begin{pmatrix}2&0\\0&3\end{pmatrix}$$
练习2:在 $\mathbb{R}^2$ 标准基下,$T$ 表示绕原点逆时针旋转90°。求矩阵。
点击查看详细解答
$T(1,0)=(0,1)$ → 第一列 $(0,1)^T$
$T(0,1)=(-1,0)$ → 第二列 $(-1,0)^T$
$$A=\begin{pmatrix}0&-1\\1&0\end{pmatrix}$$
练习3:在基 $\{1,x\}$ 下,$T(f)=xf$(乘以 $x$)的矩阵是什么?(定义域是 $\mathbb{R}[x]_1$)
点击查看答案
$T(1)=x=0\cdot1+1\cdot x$ → 第一列 $(0,1)^T$
$T(x)=x^2$,但 $x^2$ 不在空间里!这个 $T$ 的像不在定义域内,不是 $\mathbb{R}[x]_1$ 到自己的变换。
正确问法应该是 $\mathbb{R}[x]_1\to\mathbb{R}[x]_2$
4. 特征值和特征向量(必考大题,分值高)
特征值和特征向量的定义(必须背)
如果存在非零向量 $\xi$ 和数 $\lambda$,使得:
$$A\xi = \lambda\xi \quad (\xi\ne 0)$$
则 $\lambda$ 叫做 $A$ 的特征值(eigenvalue),$\xi$ 叫做对应的特征向量(eigenvector)。
几何直观理解:
特征向量是"方向不变的向量":乘以矩阵 $A$ 后,只是伸缩(长度变成 $\lambda$ 倍),方向不变。
为什么重要?
如果能找到一组基全是特征向量,矩阵在这组基下就是对角矩阵(最简单的形式)!
这就是"对角化"的意义。
求特征值和特征向量的标准步骤(必须100%掌握)
- Step 1:写特征方程 $|\lambda I - A|=0$(或 $|A-\lambda I|=0$,结果一样)
- Step 2:计算行列式,得到 $\lambda$ 的方程(特征多项式)
- Step 3:解方程,得到所有特征值 $\lambda_1, \lambda_2, \dots$
- Step 4:对每个 $\lambda_i$,解齐次方程组 $(A-\lambda_i I)X=0$
- Step 5:通解中的基础解系就是 $\lambda_i$ 对应的特征向量
为什么是 $|\lambda I-A|=0$?(理解原理)
$A\xi=\lambda\xi$ 改写成 $(A-\lambda I)\xi=0$
要有非零解 $\xi\ne 0$,系数矩阵必须不可逆
不可逆 ⇔ 行列式为0 ⇔ $|A-\lambda I|=0$
考试中:直接套公式,不需要理解原理。
例题 3.1:2阶矩阵求特征值特征向量(标准题)
题目:$A=\begin{pmatrix}2&0\\1&3\end{pmatrix}$,求所有特征值和对应的特征向量。
完整解答:
- 【写特征方程】
$$|\lambda I-A|=\begin{vmatrix}\lambda-2&0\\-1&\lambda-3\end{vmatrix}=0$$
- 【计算行列式】
$$(\lambda-2)(\lambda-3)-0\cdot(-1)=(\lambda-2)(\lambda-3)=0$$
- 【解特征方程】
特征值为 $\lambda_1=2$,$\lambda_2=3$
- 【求 $\lambda_1=2$ 的特征向量】
解 $(A-2I)X=0$:
$$\begin{pmatrix}0&0\\1&1\end{pmatrix}\begin{pmatrix}x\\y\end{pmatrix}=\begin{pmatrix}0\\0\end{pmatrix}$$
方程:$x+y=0$ → $y=-x$
令 $x=1$,得特征向量 $\xi_1=\begin{pmatrix}1\\-1\end{pmatrix}$(或任意 $\begin{pmatrix}t\\-t\end{pmatrix}, t\ne0$)
- 【求 $\lambda_2=3$ 的特征向量】
解 $(A-3I)X=0$:
$$\begin{pmatrix}-1&0\\1&0\end{pmatrix}\begin{pmatrix}x\\y\end{pmatrix}=\begin{pmatrix}0\\0\end{pmatrix}$$
方程:$-x=0$ 和 $x=0$ → $x=0$,$y$ 任意
令 $y=1$,得特征向量 $\xi_2=\begin{pmatrix}0\\1\end{pmatrix}$
- 【答案汇总】
特征值:$\lambda_1=2, \lambda_2=3$
对应特征向量:$\xi_1=\begin{pmatrix}1\\-1\end{pmatrix}, \xi_2=\begin{pmatrix}0\\1\end{pmatrix}$
- 【验证(推荐)】
$A\xi_1=\begin{pmatrix}2&0\\1&3\end{pmatrix}\begin{pmatrix}1\\-1\end{pmatrix}=\begin{pmatrix}2\\-2\end{pmatrix}=2\begin{pmatrix}1\\-1\end{pmatrix}$ ✓
例题 3.2:3阶矩阵(计算量稍大)
题目:$A=\begin{pmatrix}1&0&0\\0&2&1\\0&0&2\end{pmatrix}$,求特征值和特征向量。
解答:
- 【特征方程】
$$|\lambda I-A|=\begin{vmatrix}\lambda-1&0&0\\0&\lambda-2&-1\\0&0&\lambda-2\end{vmatrix}$$
(上三角矩阵,行列式=对角线乘积)
$$=(\lambda-1)(\lambda-2)^2=0$$
- 【特征值】
$\lambda_1=1$(单根),$\lambda_2=2$(二重根)
- 【$\lambda_1=1$ 的特征向量】
$(A-I)X=0$ → $\begin{pmatrix}0&0&0\\0&1&1\\0&0&1\end{pmatrix}X=0$
得 $y+z=0, z=0$ → $y=z=0$,$x$ 任意
$\xi_1=\begin{pmatrix}1\\0\\0\end{pmatrix}$
- 【$\lambda_2=2$ 的特征向量(重根要注意)】
$(A-2I)X=0$ → $\begin{pmatrix}-1&0&0\\0&0&1\\0&0&0\end{pmatrix}X=0$
得 $x=0, z=0$,$y$ 任意
特征空间维数=1(只有一个方向)
$\xi_2=\begin{pmatrix}0\\1\\0\end{pmatrix}$
- 【重要观察】
$\lambda=2$ 是二重根,但特征空间只有1维!
这意味着不能对角化(后面会详细讲)
特征值的重要性质(选择题常考)
- 迹等于特征值之和:$\text{tr}(A)=\lambda_1+\lambda_2+\cdots+\lambda_n$
- 行列式等于特征值之积:$|A|=\lambda_1\cdot\lambda_2\cdots\lambda_n$
- 不同特征值的特征向量线性无关
- $A^k$ 的特征值是 $\lambda^k$(特征向量不变)
- $A$ 可逆 ⇔ 所有特征值 $\ne0$
- $A^{-1}$ 的特征值是 $\frac{1}{\lambda}$
快速练习
练习1:$A=\begin{pmatrix}3&0\\0&5\end{pmatrix}$(对角矩阵)的特征值是什么?
点击查看答案
对角矩阵的特征值就是对角元:$\lambda_1=3, \lambda_2=5$
特征向量:$\begin{pmatrix}1\\0\end{pmatrix}, \begin{pmatrix}0\\1\end{pmatrix}$
5. 对角化(综合题常考,必须完全掌握)
对角化的定义
如果存在可逆矩阵 $P$,使得:
$$P^{-1}AP = D \quad \text{($D$ 是对角矩阵)}$$
则称 $A$ 可对角化。
等价形式:$A = PDP^{-1}$($A$ 相似于对角矩阵 $D$)
对角化的意义(为什么要对角化):
① 计算 $A^n$ 超简单:$A^n = PD^nP^{-1}$,而 $D^n$ 只需要把对角元素分别 $n$ 次方
② 理解线性变换:对角矩阵表示"沿着坐标轴伸缩",最简单的变换
③ 解微分方程、差分方程等应用
考试中:主要考"判断能否对角化"和"求 $P$ 和 $D$"
对角化判别法(必须背熟)
充要条件:$n$ 阶矩阵 $A$ 可对角化 ⇔ $A$ 有 $n$ 个线性无关的特征向量
实用判别法:
- 方法1(最简单):如果 $A$ 有 $n$ 个不同的特征值,则一定可对角化
- 方法2(重根情况):对每个特征值 $\lambda_i$:
- 代数重数 = $\lambda_i$ 作为特征方程的根的重数
- 几何重数 = 特征空间 $\dim\ker(A-\lambda_i I)$ 的维数
- 几何重数 = 代数重数 对所有特征值都成立 → 可对角化
- 几何重数 < 代数重数 存在某个特征值 → 不可对角化
- 方法3(最保险):数一下有几个线性无关的特征向量,够 $n$ 个就行
例题 4.1:可对角化的情况(标准题)
题目:$A=\begin{pmatrix}1&2\\0&3\end{pmatrix}$,判断能否对角化,若能,求 $P$ 和 $D$。
完整解答:
- 【求特征值】
$|\lambda I-A|=\begin{vmatrix}\lambda-1&-2\\0&\lambda-3\end{vmatrix}=(\lambda-1)(\lambda-3)=0$
特征值:$\lambda_1=1, \lambda_2=3$(两个不同特征值)
- 【判断可对角化】
2阶矩阵有2个不同特征值,一定可对角化 ✓
- 【求特征向量】
$\lambda_1=1$:
$(A-I)X=\begin{pmatrix}0&2\\0&2\end{pmatrix}X=0$ → $y=0$,$x$ 任意
取 $\xi_1=\begin{pmatrix}1\\0\end{pmatrix}$
$\lambda_2=3$:
$(A-3I)X=\begin{pmatrix}-2&2\\0&0\end{pmatrix}X=0$ → $x=y$
取 $\xi_2=\begin{pmatrix}1\\1\end{pmatrix}$
- 【构造 $P$ 和 $D$】
$$P=(\xi_1, \xi_2)=\begin{pmatrix}1&1\\0&1\end{pmatrix}$$
$$D=\begin{pmatrix}\lambda_1&0\\0&\lambda_2\end{pmatrix}=\begin{pmatrix}1&0\\0&3\end{pmatrix}$$
($P$ 的列是特征向量,$D$ 的对角元是对应的特征值)
- 【验证(推荐)】
$AP=\begin{pmatrix}1&2\\0&3\end{pmatrix}\begin{pmatrix}1&1\\0&1\end{pmatrix}=\begin{pmatrix}1&3\\0&3\end{pmatrix}$
$PD=\begin{pmatrix}1&1\\0&1\end{pmatrix}\begin{pmatrix}1&0\\0&3\end{pmatrix}=\begin{pmatrix}1&3\\0&3\end{pmatrix}$ ✓
($AP=PD$ 说明 $P^{-1}AP=D$)
关键点:$P$ 的第 $j$ 列是 $D$ 的第 $j$ 个对角元的特征向量,顺序要对应!
例题 4.2:不可对角化的典型例子(必须会判断)
题目:$A=\begin{pmatrix}1&1\\0&1\end{pmatrix}$ 是否可对角化?
解答:
- 【求特征值】
$|\lambda I-A|=(\lambda-1)^2=0$
只有一个特征值 $\lambda=1$,代数重数=2
- 【求特征空间】
$(A-I)X=\begin{pmatrix}0&1\\0&0\end{pmatrix}X=0$
方程:$y=0$,$x$ 任意
特征空间:$\text{span}\left\{\begin{pmatrix}1\\0\end{pmatrix}\right\}$,几何重数=1
- 【判断】
几何重数(1) < 代数重数(2),不可对角化 ✗
- 【原因分析】
2阶矩阵需要2个线性无关的特征向量才能对角化,但现在只有1个方向。
常见错误警告:
❌ 错误1:$P$ 的列和 $D$ 的对角元顺序不对应
❌ 错误2:重根时没检查几何重数就说能对角化
❌ 错误3:特征向量取成零向量(特征向量必须非零)
✓ 正确做法:先判断能否对角化,能才继续求 $P,D$
立即练习
练习1:$A=\begin{pmatrix}5&0\\0&5\end{pmatrix}$(数量矩阵)能否对角化?
点击查看答案
能(已经是对角矩阵了)
练习2:若 $A$ 是3阶矩阵,特征值为 $1,2,2$,且 $\lambda=2$ 的特征空间维数为1,能对角化吗?
点击查看答案
不能。$\lambda=2$ 的几何重数(1) < 代数重数(2)
第七章最低要会什么(60分保命清单)
必须100%掌握(占第七章80%分值):
- ✅ 求核和像(核解 $AX=0$,像找列空间)
- ✅ 会用秩-零化度公式 $\dim V=\dim\ker T+\dim\operatorname{Im} T$
- ✅ 求矩阵表示(第 $j$ 列 = $T(\varepsilon_j)$ 的坐标)
- ✅ 求特征值特征向量(解 $|\lambda I-A|=0$,再解 $(A-\lambda I)X=0$)
- ✅ 判断能否对角化(不同特征值→能;重根看几何重数)
争取掌握(冲70-80分):
- ◐ 非标准基下的矩阵表示(需要求坐标)
- ◐ 对角化求 $P$ 和 $D$(构造矩阵)
- ◐ 重根情况判断对角化(算几何重数)
常见失分点(考前再看一遍):
- ❌ 核和像算完忘记验证秩-零化度公式
- ❌ 矩阵表示时把 $T(\varepsilon_j)$ 本身当成第 $j$ 列(要算坐标)
- ❌ 特征向量写成零向量
- ❌ 对角化时 $P$ 的列和 $D$ 的对角元顺序不对应
- ❌ 重根时没检查几何重数就说能对角化
Chapter 9
第九章 欧几里得空间
欧几里得空间就是在线性空间里加上“长度”和“角度”。考试常考内积、正交、标准正交化、正交矩阵。
过关知识清单:欧几里得空间的考试主线 重点
Hook:前面只研究“能不能线性组合”,这一章开始研究“长度是多少、角度是不是直角、怎么把一组向量整理成互相垂直”。
欧几里得空间题 = 内积计算 + 正交补 + Gram-Schmidt + 正交矩阵。它比前几章直观,但很容易在分数和根号上丢小分。
Why:标准正交基能让坐标、投影、矩阵计算都变简单,所以老师喜欢考“把普通基整理成标准正交基”。
What:内积给出长度和角度;正交就是内积为 0;正交矩阵满足 $Q^TQ=I$,列向量是一组标准正交基。
How:求正交补就设未知向量,与给定生成元逐个内积为 0;Gram-Schmidt 的核心动作是“减去投影”,最后除以长度单位化。
易错:正交化后得到的是互相垂直的向量,标准正交化还要单位化。少写单位化步骤,计算题会丢结论分。
Checkpoint:两个向量内积为 0 就一定都是零向量吗?
参考答案
不是。内积为 0 表示它们正交,例如 $(1,0)$ 和 $(0,1)$ 都不是零向量,但内积为 0。1. 内积、长度、正交
在 $\mathbb R^n$ 中,最常见内积是点乘:
$$(\alpha,\beta)=\alpha^T\beta=a_1b_1+\cdots+a_nb_n$$
长度是 $\|\alpha\|=\sqrt{(\alpha,\alpha)}$。如果 $(\alpha,\beta)=0$,就说它们正交。
例题 1:判断正交
$\alpha=(1,2,-1)$,$\beta=(2,-1,0)$,判断是否正交。
- 算内积:$(\alpha,\beta)=1\cdot2+2\cdot(-1)+(-1)\cdot0$。
- 结果为 $2-2+0=0$。
- 所以 $\alpha$ 与 $\beta$ 正交。
2. 投影与正交补
向量 $\alpha$ 在非零向量 $\beta$ 方向上的投影为:
$$\operatorname{proj}_{\beta}\alpha=\frac{(\alpha,\beta)}{(\beta,\beta)}\beta$$
正交补 $W^\perp$ 是所有与 $W$ 中每个向量都正交的向量组成的空间。
例题 2:求正交补
在 $\mathbb R^3$ 中,$W=\operatorname{span}\{(1,1,0)\}$。求 $W^\perp$。
- 设 $x=(a,b,c)$ 属于 $W^\perp$。
- 它必须与 $(1,1,0)$ 正交,所以 $a+b=0$。
- 令 $b=s,c=t$,则 $a=-s$。
- $x=s(-1,1,0)+t(0,0,1)$。
所以 $W^\perp=\operatorname{span}\{(-1,1,0),(0,0,1)\}$。
3. Gram-Schmidt 标准正交化
目标:把一组线性无关向量变成一组互相正交的向量,再单位化。
两向量版本一定要会
- $\beta_1=\alpha_1$。
- $\beta_2=\alpha_2-\frac{(\alpha_2,\beta_1)}{(\beta_1,\beta_1)}\beta_1$。
- $e_1=\frac{\beta_1}{\|\beta_1\|},\ e_2=\frac{\beta_2}{\|\beta_2\|}$。
例题 3:标准正交化
把 $\alpha_1=(1,0,1)$,$\alpha_2=(1,1,0)$ 正交化。
- $\beta_1=\alpha_1=(1,0,1)$。
- $(\alpha_2,\beta_1)=1$,$(\beta_1,\beta_1)=2$。
- $\beta_2=\alpha_2-\frac12\beta_1=(1,1,0)-(\frac12,0,\frac12)=(\frac12,1,-\frac12)$。
- 为了好看,可乘 2,取 $\beta_2'=(1,2,-1)$。它仍与 $\beta_1$ 正交。
- 单位化:$e_1=\frac{1}{\sqrt2}(1,0,1)$,$e_2=\frac{1}{\sqrt6}(1,2,-1)$。
4. 正交矩阵
矩阵 $Q$ 是正交矩阵,当且仅当:
$$Q^TQ=I$$
等价地说,$Q$ 的列向量构成一组标准正交基。
例题 4:判断正交矩阵
$Q=\frac{1}{\sqrt2}\begin{pmatrix}1&1\\1&-1\end{pmatrix}$ 是否正交?
- 第一列 $q_1=(\frac1{\sqrt2},\frac1{\sqrt2})^T$,长度为 1。
- 第二列 $q_2=(\frac1{\sqrt2},-\frac1{\sqrt2})^T$,长度为 1。
- 内积 $(q_1,q_2)=\frac12-\frac12=0$。
- 列向量标准正交,所以 $Q$ 是正交矩阵。
这一章最低要会什么
- 会算内积、长度、正交。
- 会求简单正交补。
- 会做两到三个向量的 Gram-Schmidt。
- 会判断正交矩阵。
题型模板库
二次型矩阵表示
平方项放对角,交叉项除以 2 放对称位置。最后写 $f=X^TAX$。
二次型化标准形
有平方项就配方;没有平方项先用变量替换造平方项。答案要写新变量和标准形。
正定判别
实对称矩阵先算顺序主子式。全部大于 0 才正定。
子空间判断
零向量、加法封闭、数乘封闭。非齐次等式一般直接否定。
求基和维数
把向量排成矩阵行化简,主元列对应原向量。主元数就是维数。
求坐标
设目标向量等于基向量线性组合,列方程解系数。
求核和像
核解 $AX=0$;像找列空间。用核维数加像维数检查。
线性变换矩阵
第 $j$ 列是第 $j$ 个基向量的像在目标基下的坐标。
特征值和对角化
先求 $|\lambda I-A|=0$,再求特征向量。特征向量够 $n$ 个才可对角化。
正交化
减投影得到正交向量,再除以长度单位化。
证明题/计算题救命模板
这部分不是为了写得漂亮,而是为了考试时不空题。你先把这些开头和步骤背熟,遇到题就按模板展开。
模板 1:证明某集合是子空间 必考
先验零向量,再证加法封闭和数乘封闭。
标准开头:设 $W$ 为题中集合。要证 $W$ 是子空间,只需证明 $0\in W$,且对任意 $u,v\in W$、任意数 $k$,有 $u+v\in W$、$ku\in W$。
写题顺序:代入零向量;设两个一般元素满足条件;把它们相加,看条件仍成立;再数乘,看条件仍成立。
易错:如果条件是 $x+y=1$ 这种非齐次式,零向量不满足,第一步就可以判定不是子空间。
Checkpoint:证明子空间时最先检查什么?
参考答案
最先检查零向量是否在集合里。零向量不在,就不用继续证明封闭性。模板 2:证明向量组线性无关 重点
设线性组合等于 0,最后推出所有系数都为 0。
标准开头:设 $k_1\alpha_1+k_2\alpha_2+\cdots+k_s\alpha_s=0$。若能推出 $k_1=k_2=\cdots=k_s=0$,则该向量组线性无关。
计算落点:把向量按列组成矩阵,解齐次方程组。只有零解就是线性无关;有自由变量就是线性相关。
不会证明时:直接写“由齐次方程组的系数矩阵行化简可得只有零解”,再给出化简结果。
模板 3:求基、维数、坐标 必考
求基看主元列;求维数数主元;求坐标列方程。
求基:将向量按列排成矩阵,行化简,主元列对应的原向量构成一组基。
求维数:维数等于极大线性无关组中向量个数,也就是矩阵的秩。
求坐标:设 $\alpha=x_1e_1+\cdots+x_ne_n$,比较坐标得到方程组,解出的 $x_1,\dots,x_n$ 就是坐标。
易错:行化简可以帮助判断主元列,但答案中的基要写原向量,不要写化简后的列。
模板 4:证明直和 重点
直和的核心是交集只有零向量,或者表示唯一。
常用写法 A:证明 $U\cap V=\{0\}$,并且 $\dim(U+V)=\dim U+\dim V$,于是 $U+V=U\oplus V$。
常用写法 B:若 $u_1+v_1=u_2+v_2$,则 $u_1-u_2=v_2-v_1$ 属于 $U\cap V$。若交集只有 0,则 $u_1=u_2,v_1=v_2$,表示唯一。
及格策略:先写维数公式 $\dim(U+V)=\dim U+\dim V-\dim(U\cap V)$,再把题目给的数据代进去。
模板 5:求核、像、秩-零化度 必考
核解 $AX=0$,像找列空间,维数用 $\dim V=\dim\ker T+\dim\operatorname{Im}T$ 检查。
求核:令 $T(X)=0$。如果 $T(X)=AX$,就解齐次方程 $AX=0$,把通解写成若干向量的线性组合。
求像:看 $A$ 的列向量张成的空间,对列向量组行化简,取主元列对应的原列向量作为像空间的一组基。
检查:核维数 + 像维数必须等于定义域维数。算完一定用这句验算,能救很多粗心错。
模板 6:判断可对角化 必考
可对角化 = 有 $n$ 个线性无关特征向量。
标准步骤:先求 $|\lambda I-A|=0$ 得特征值;再对每个特征值解 $(A-\lambda I)X=0$;最后把各特征空间维数相加。
结论句:若所有特征空间维数之和为 $n$,则 $A$ 可对角化;否则不可对角化。
易错:有 $n$ 个不同特征值时一定可对角化;但有重特征值时不能直接判死,要继续求特征空间维数。
模板 7:二次型化标准形 必考
有平方项就配方;没有平方项就先造平方项。
配方法:先挑一个平方项,把含这个变量的项配成完整平方,剩下部分继续配。
无平方项:如果有 $x_1x_2$,可令 $x_1=y_1+y_2,\ x_2=y_1-y_2$,先把交叉项变出平方项,再继续配方。
结尾别漏:答案要写标准形,也要写变量替换关系。只写结果会丢步骤分。
模板 8:Gram-Schmidt 标准正交化 重点
先减投影变正交,再除长度变单位。
两向量必背:$\beta_1=\alpha_1$,$\beta_2=\alpha_2-\frac{(\alpha_2,\beta_1)}{(\beta_1,\beta_1)}\beta_1$。
最后一步:$e_i=\frac{\beta_i}{\|\beta_i\|}$。如果题目要“标准正交基”,这一步不能省。
易错:把正交化当成标准正交化。正交只要求内积为 0,标准正交还要求每个向量长度为 1。
老师作业原题重点
这一组题是老师本学期专门布置的作业,期末出现原题、改数字题、换说法题的概率都很高。复习时先按下面的“拿分入口”把题目拆开,再去看原图核对题面。
及格策略:这些题不要只看答案。每道题至少要会写出第一行、关键定理和最后结论;考试遇到相似题,就先按这里的入口套进去。
高频证明
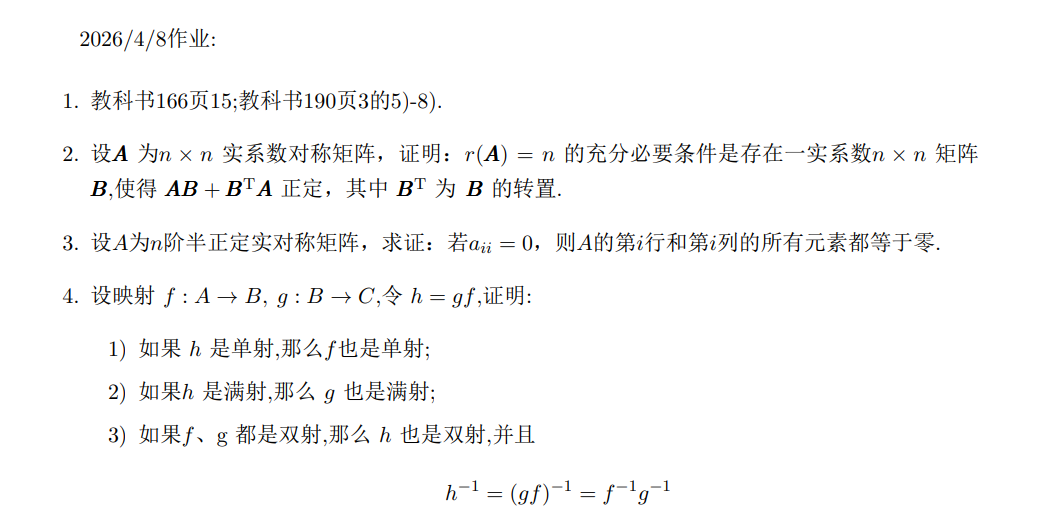
2026/4/8 作业:正定矩阵、半正定矩阵、映射
- 实对称矩阵 $A$,证明 $r(A)=n$ 当且仅当存在实矩阵 $B$,使 $AB+B^TA$ 正定。
- 半正定实对称矩阵 $A$ 中,若 $a_{ii}=0$,证明第 $i$ 行和第 $i$ 列全为 0。
- 设 $f:A\to B,\ g:B\to C,\ h=gf$,证明单射、满射、双射及 $(gf)^{-1}=f^{-1}g^{-1}$ 的相关结论。
拿分入口:
- 正定题先抓定义:对任意 $x\ne0$,目标是证明 $x^T(AB+B^TA)x>0$。
- $r(A)=n$ 等价于 $A$ 可逆。构造题常取 $B=A^{-1}$,此时 $AB+B^TA=E+(A^{-1})^TA$,若 $A$ 对称则可化到 $2E$。
- 半正定题用二次型小技巧:看 $(e_i+te_j)^TA(e_i+te_j)\ge0$,得到关于 $t$ 的二次式,由 $a_{ii}=0$ 推出 $a_{ij}=0$。
- 映射题只背定义:单射看“像相等推出原像相等”,满射看“任取目标元素能找到原像”,逆映射公式按复合顺序反过来写。
查看老师原图
线性空间
2026/4/29 作业:子空间关系、矩阵多项式、换基
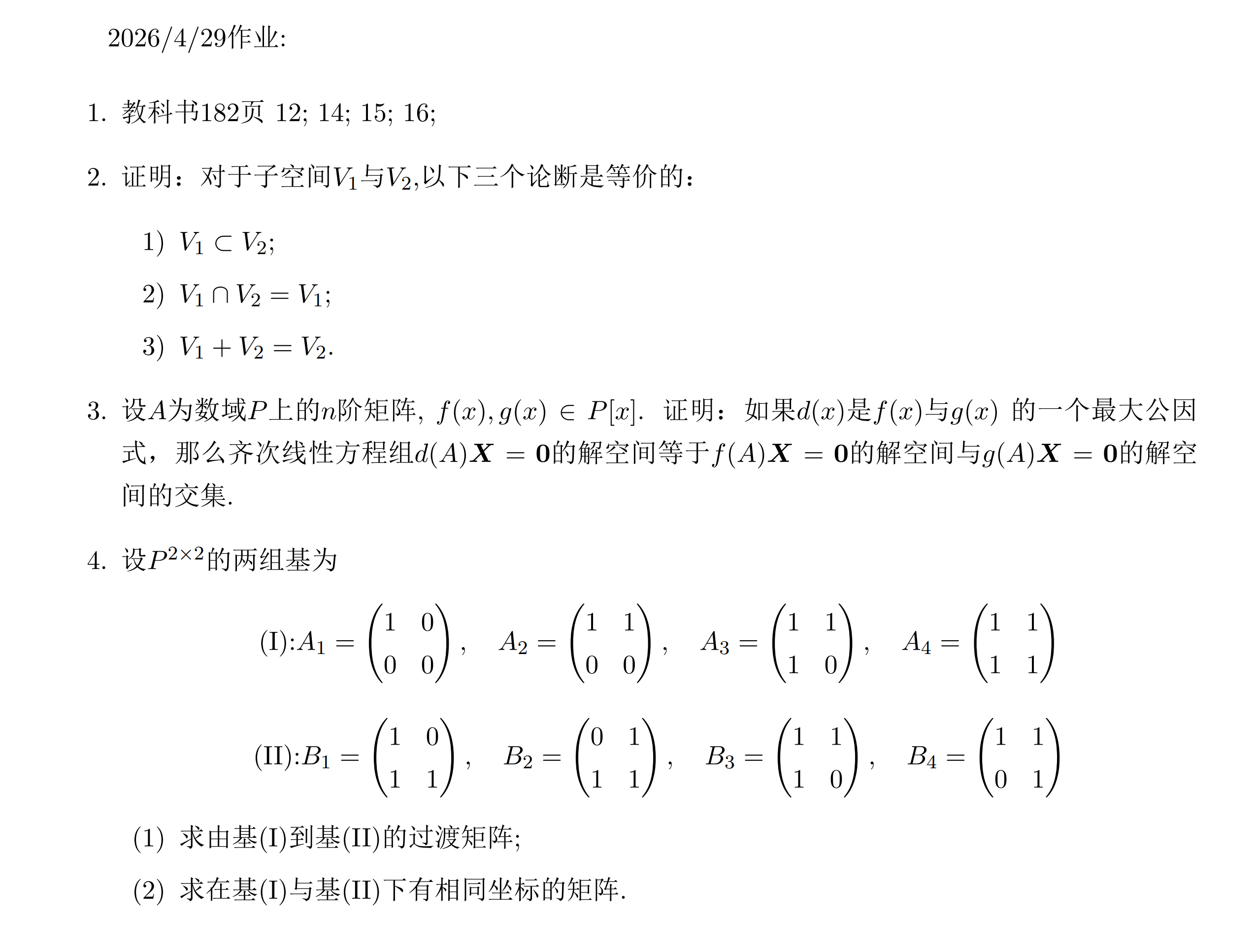
- 对子空间 $V_1,V_2$,证明 $V_1\subset V_2$、$V_1\cap V_2=V_1$、$V_1+V_2=V_2$ 三者等价。
- 若 $d(x)$ 是 $f(x),g(x)$ 的最大公因式,证明 $d(A)X=0$ 的解空间等于 $f(A)X=0$ 与 $g(A)X=0$ 解空间的交。
- 在 $P^{2\times2}$ 中给两组基,求从基 I 到基 II 的过渡矩阵,并求在两组基下坐标相同的矩阵。
拿分入口:
- 子空间包含关系题全部从定义写:$V_1\subset V_2$ 就是任取 $v\in V_1$,要推出 $v\in V_2$。
- 交等于小空间、和等于大空间是包含关系的翻译题:$V_1\cap V_2=V_1$ 本质说明 $V_1$ 全在 $V_2$ 里。
- 最大公因式题用 Bezout 等式:存在 $u(x),v(x)$ 使 $d=uf+vg$;再把 $x$ 换成矩阵 $A$。
- 换基题固定套路:把新基向量用旧基表示,坐标列排成过渡矩阵;“坐标相同”就是列向量 $X$ 满足过渡关系后仍等于自己。
查看老师原图
换基计算
多项式空间换基 + 亚正定等价
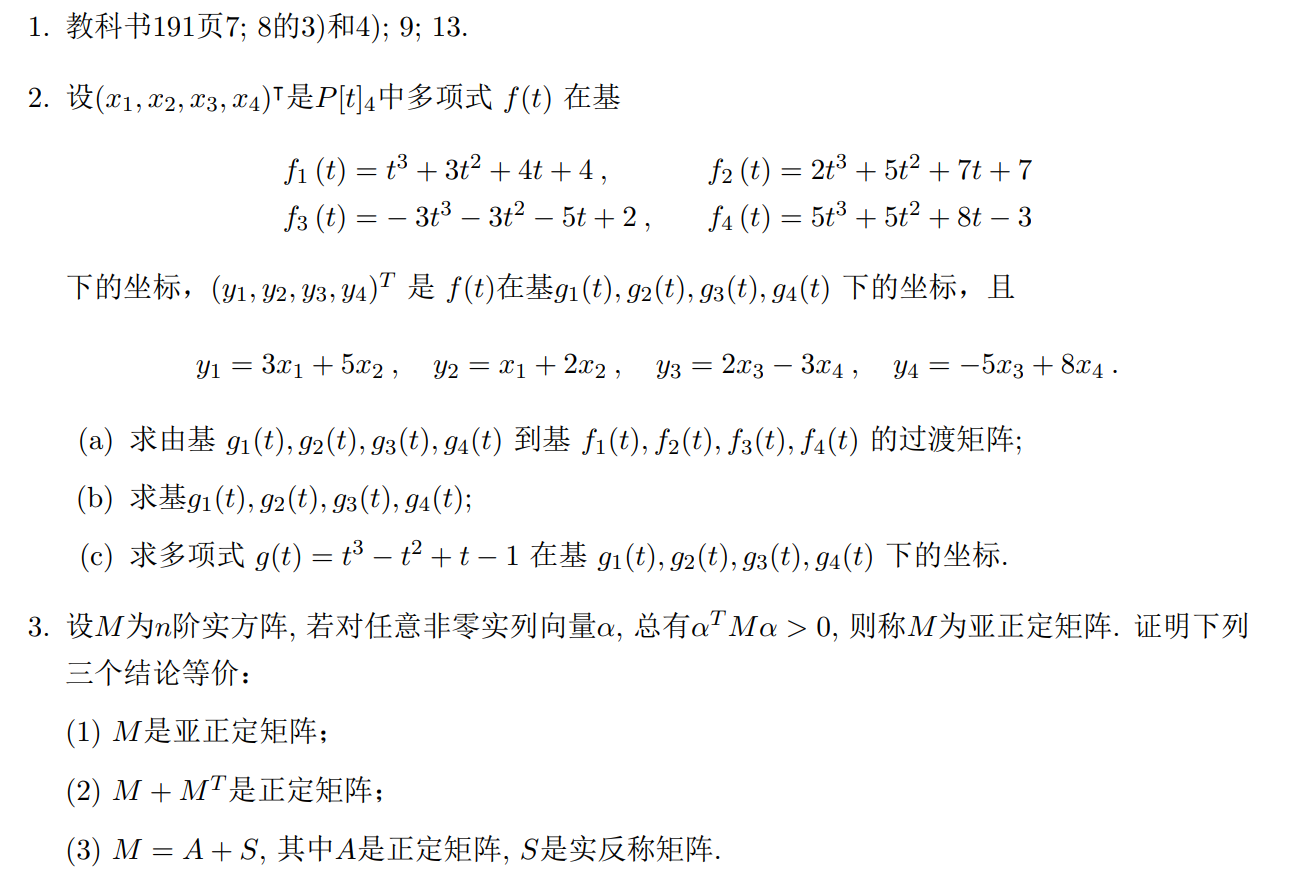
- 在 $P[t]_4$ 中给出 $f_1,f_2,f_3,f_4$,并给出 $x$ 坐标与 $y$ 坐标关系,求从 $g$ 基到 $f$ 基的过渡矩阵、求 $g$ 基、求 $g(t)=t^3-t^2+t-1$ 的坐标。
- 对实矩阵 $M$,若任意非零实列向量 $\alpha$ 有 $\alpha^TM\alpha>0$,证明 $M$ 亚正定、$M+M^T$ 正定、$M=A+S$ 且 $A$ 正定 $S$ 反对称三者等价。
拿分入口:
- 坐标关系题先写成矩阵式 $Y=PX$。如果题目问“从 $g$ 基到 $f$ 基”,要看它要的是坐标怎么变,不要把基向量怎么变混掉。
- 求 $g$ 基时,用“同一个向量 = 基矩阵乘坐标”:$[v]=F X=G Y$,再由 $Y=PX$ 推出 $G=FP^{-1}$。
- 求某个多项式坐标:先用普通幂基列出系数,再解“基矩阵 × 坐标 = 系数列”。
- 亚正定题记住核心恒等式:$\alpha^TM\alpha=\alpha^T\frac{M+M^T}{2}\alpha$,因为反对称部分在二次型里等于 0。
查看老师原图
线性变换
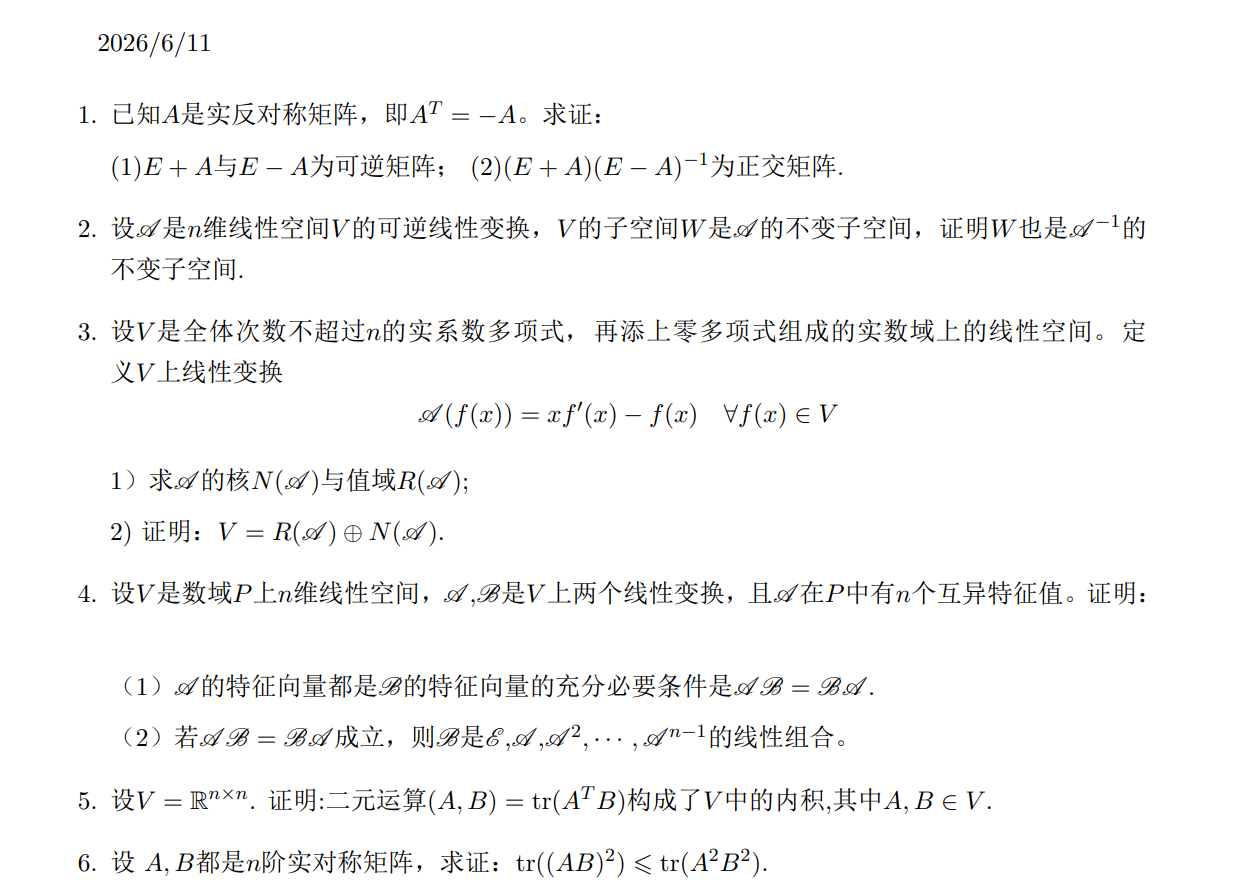
2026/6/11 作业:反对称矩阵、不变子空间、特征值、内积
- 实反对称矩阵 $A^T=-A$,证明 $E+A$、$E-A$ 可逆,且 $(E+A)(E-A)^{-1}$ 是正交矩阵。
- $A$ 可逆且 $W$ 是 $A$ 的不变子空间,证明 $W$ 也是 $A^{-1}$ 的不变子空间。
- $V$ 为次数不超过 $n$ 的多项式空间,$A(f)=xf'(x)-f(x)$,求核、像,并证明 $V=R(A)\oplus N(A)$。
- 线性变换 $A,B$ 可交换且 $A$ 有 $n$ 个不同特征值:讨论公共特征向量、$AB=BA$,以及 $B$ 可表示成 $E,A,\dots,A^{n-1}$ 的线性组合。
- 在 $V=\mathbb R^{n\times n}$ 中证明 $(A,B)=tr(A^TB)$ 是内积;对称矩阵 $A,B$ 证明 $tr((AB)^2)\le tr(A^2B^2)$。
拿分入口:
- 反对称矩阵题常用 $x^TAx=0$。若 $(E-A)x=0$,左乘 $x^T$ 得 $\|x\|^2=0$,所以 $x=0$,矩阵可逆。
- 正交矩阵证明就算 $Q^TQ$,把 $A^T=-A$ 代进去,目标化成 $E$。
- 不变子空间题:$W$ 对 $A$ 不变表示 $A(W)\subset W$;若 $A$ 可逆且维数不变,通常可推出 $A(W)=W$,再得 $A^{-1}(W)\subset W$。
- 算多项式线性变换时,用基 $1,x,x^2,\dots,x^n$,因为 $A(x^k)=(k-1)x^k$,特征值一眼能看出。
- 迹内积题按四条内积公理写:对称性、线性性、正定性。最后不等式可往 Frobenius 内积或 $tr(C^TC)\ge0$ 上靠。
查看老师原图
欧氏空间
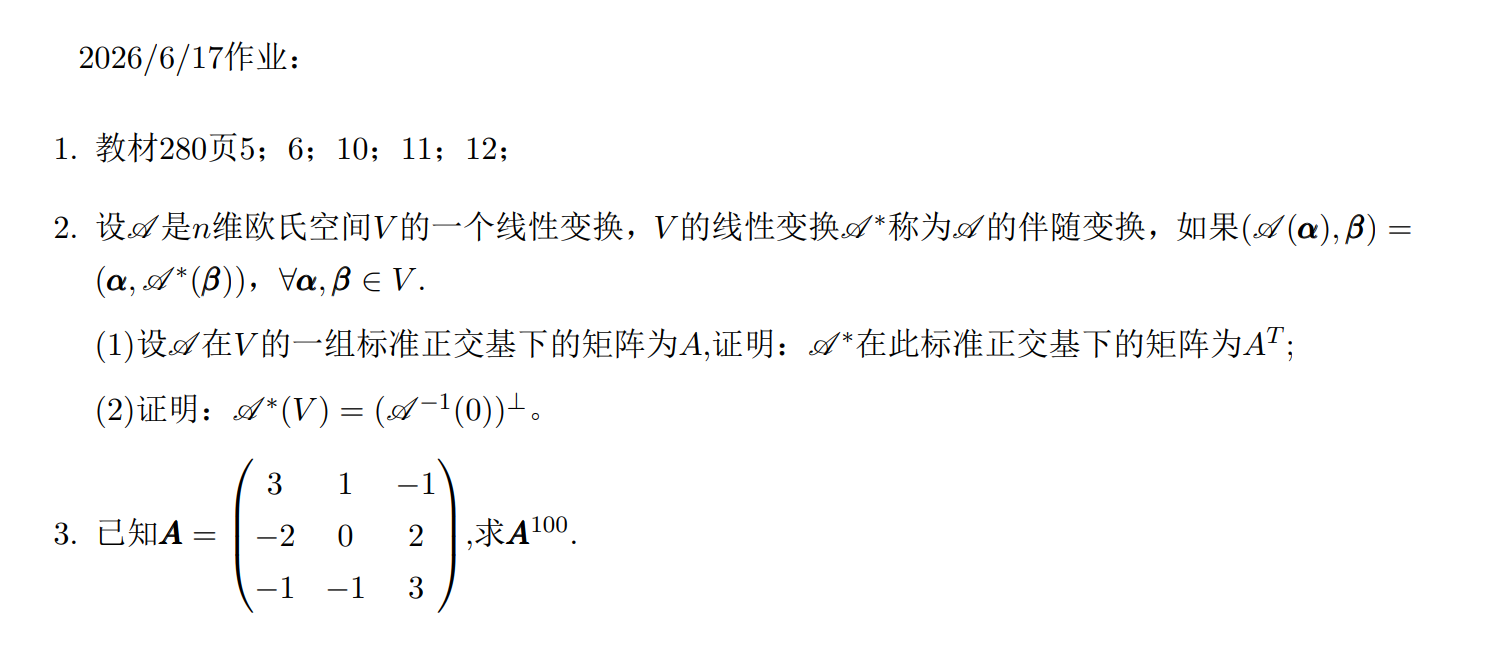
2026/6/17 作业:伴随变换与矩阵高次幂
- 欧氏空间中伴随变换 $A^*$ 满足 $(A(\alpha),\beta)=(\alpha,A^*(\beta))$。
- 若 $A$ 在标准正交基下的矩阵为 $A$,证明 $A^*$ 的矩阵为 $A^T$。
- 证明 $A^*(V)=(A^{-1}(0))^\perp$。
- 给定 $A=\begin{pmatrix}3&1&-1\\-2&0&2\\-1&-1&3\end{pmatrix}$,求 $A^{100}$。
拿分入口:
- 伴随变换题永远从定义开头:$(A\alpha,\beta)=(\alpha,A^*\beta)$。标准正交基下内积就是转置相乘,所以矩阵自然转置。
- $A^*(V)=(N(A))^\perp$ 这类题要分两边包含证明:先证像中任意向量都垂直于核,再用维数相等收尾。
- 求 $A^{100}$ 先不要硬乘。第一反应是找特征值、最小多项式或对角化:若能写 $A=PDP^{-1}$,就有 $A^{100}=PD^{100}P^{-1}$。
- 如果矩阵有特殊关系,比如 $A^2$ 很简单,就用递推降幂。考试中老师给这种题,通常一定藏着“幂会简化”的结构。
查看老师原图
章节测试
按 `exampass` 的出题规则,这里把高代题分成“自动批改题”和“手写步骤题”。自动题先抓概念,手写题训练真正能在卷子上拿分的步骤。
二次型矩阵表示
$f=x_1^2+6x_1x_2+2x_2^2$ 的矩阵 $A$ 中,$a_{12}$ 应为多少?
交叉项 $6x_1x_2$ 在 $X^TAX$ 中来自 $a_{12}x_1x_2+a_{21}x_2x_1$。对称矩阵里 $a_{12}=a_{21}$,所以 $2a_{12}=6$,得到 $a_{12}=3$。
合同与相似
判断:二次型作可逆线性替换 $X=CY$ 后,矩阵变化为 $C^{-1}AC$。
错误。二次型变换是 $X^TAX=(CY)^TA(CY)=Y^T(C^TAC)Y$,所以矩阵变化为 $C^TAC$,这是合同变换,不是相似变换。
正定判别
实对称矩阵 $A$ 正定的常用充分必要条件是:
实对称矩阵正定常用 Sylvester 判别法:左上角顺序主子式 $\Delta_1,\Delta_2,\dots,\Delta_n$ 全部大于 0。
子空间判断
下面哪个集合一定不是 $\mathbb R^3$ 的子空间?
A 不含零向量,因为 $0+0+0\ne1$。子空间第一关就是零向量必须在里面。
基和维数
求向量组生成空间的一组基时,行化简后应该选什么?
如果把向量按列排成矩阵,列空间的基要回到原矩阵中取主元列对应的原向量。直接拿化简后的列容易写错空间。
坐标唯一性
判断:在给定一组基后,空间中每个向量关于这组基的坐标是唯一的。
正确。基的线性无关性保证表示唯一,生成性保证一定能表示。
核和像维数
$T:\mathbb R^4\to\mathbb R^3$ 的矩阵秩为 2,则 $\dim\ker T$ 等于:
定义域维数是 4,像维数等于秩 2,所以核维数 $=4-2=2$。
基下矩阵
线性变换在基 $\varepsilon_1,\varepsilon_2,\dots,\varepsilon_n$ 下的矩阵,第 $j$ 列是什么?
这是本章最重要的落笔规则:先算基向量的像,再把像写成这组基的线性组合,坐标列依次放入矩阵。
对角化
判断:只要矩阵有重特征值,就一定不能对角化。
错误。重特征值能不能对角化,要看对应特征空间维数。例如 $2I$ 有重特征值 2,但已经是对角矩阵。
内积与正交
在通常内积下,$(1,2,-1)$ 与 $(2,-1,0)$ 的关系是:
内积 $1\cdot2+2\cdot(-1)+(-1)\cdot0=0$,所以两个向量正交。
正交矩阵
判断矩阵 $Q$ 为正交矩阵,最直接的条件是:
正交矩阵定义就是 $Q^TQ=I$,等价于列向量组成标准正交基。
Gram-Schmidt
判断:Gram-Schmidt 正交化的核心动作,是从后面的向量中减去它在前面向量方向上的投影。
正确。两向量时 $\beta_2=\alpha_2-\frac{(\alpha_2,\beta_1)}{(\beta_1,\beta_1)}\beta_1$,就是把 $\alpha_2$ 沿 $\beta_1$ 的投影减掉。
手写步骤题
计算 1:二次型矩阵与正定
把 $f=x_1^2+4x_1x_2+4x_2^2+2x_1x_3+x_3^2$ 写成矩阵,并判断是否正定。
参考步骤:$A=\begin{pmatrix}1&2&1\\2&4&0\\1&0&1\end{pmatrix}$。先看 $A$ 对称;再算顺序主子式:$\Delta_1=1>0$,$\Delta_2=\begin{vmatrix}1&2\\2&4\end{vmatrix}=0$。正定要求顺序主子式全大于 0,所以不正定。
评分点:矩阵 3 分,主子式 3 分,结论 2 分。
计算 2:子空间与维数
判断 $W=\{(x,y,z):x-y=0,\ z=0\}$ 是否为 $\mathbb R^3$ 子空间,并求维数。
参考步骤:这是齐次线性方程组的解集,所以是子空间。由 $x-y=0,z=0$ 得 $x=y=t,z=0$,于是 $(x,y,z)=t(1,1,0)$。因此 $W=\operatorname{span}\{(1,1,0)\}$,维数为 1。
评分点:说明子空间原因 2 分,参数表示 3 分,基和维数 3 分。
计算 3:核和像
$A=\begin{pmatrix}1&1&0\\0&1&1\end{pmatrix}$,求 $T(X)=AX$ 的核维数和像维数。
参考步骤:$A$ 的两行线性无关,所以 $\operatorname{rank}A=2$。像空间维数等于矩阵秩,即 $\dim\operatorname{Im}T=2$。定义域是 $\mathbb R^3$,由 $\dim\ker T+\dim\operatorname{Im}T=3$,得 $\dim\ker T=1$。
评分点:秩 2 分,像维数 2 分,秩-零化度公式 3 分,核维数 1 分。
计算 4:标准正交化
把 $(1,1,0)$ 和 $(1,0,1)$ 正交化,并写出一组标准正交向量。
参考步骤:取 $\beta_1=(1,1,0)$。计算 $(\alpha_2,\beta_1)=1$,$(\beta_1,\beta_1)=2$,所以 $\beta_2=(1,0,1)-\frac12(1,1,0)=(\frac12,-\frac12,1)$,可同乘 2 取 $(1,-1,2)$。单位化得到 $e_1=\frac1{\sqrt2}(1,1,0)$,$e_2=\frac1{\sqrt6}(1,-1,2)$。
评分点:投影系数 3 分,正交向量 3 分,单位化 2 分。
雨课堂来源对照
当前网页内容严格围绕 cj 已登录雨课堂中的 19 个活动整理。原始 PPT 图片因链接带私有时效,暂未稳定离线化;这里先保留活动对照,后续拿到 PDF/PPT 后可继续补成右侧原始课件栏。
第五章二次型;第五章二次型(2);第五章二次型(3);第五章二次型(4)。
第六章线性空间;线性空间(2)至(6);第六章线性空间202605060820。
第七章线性变换;线性变换(2);线性变换(3);线性变换(4);线性变换(5)。
第九章欧几里得空间;欧几里得空间(2);欧几里得空间(3)。
考前速查
| 看到什么 | 马上想到 | 落笔写法 |
|---|---|---|
| $kx_ix_j$ | 交叉项除以 2 | $a_{ij}=a_{ji}=k/2$ |
| 二次型正定 | 顺序主子式 | $\Delta_1>0,\dots,\Delta_n>0$ |
| 是不是子空间 | 零向量、封闭性 | 非空,加法封闭,数乘封闭 |
| 求基/维数 | 行化简 | 主元列对应基,主元数是维数 |
| 求坐标 | 列线性组合方程 | $\alpha=x_1e_1+\cdots+x_ne_n$ |
| 求核 | 解齐次方程 | $AX=0$ |
| 求像 | 找列空间 | 列向量组的极大无关组 |
| 求特征值 | 特征多项式 | $|\lambda I-A|=0$ |
| 对角化 | 特征向量够不够 | 特征空间维数总和是否为 $n$ |
| 正交矩阵 | 列向量标准正交 | $Q^TQ=I$ |
易错清单
- 二次型矩阵必须对称,交叉项不要忘记除以 2。
- 合同和相似不要混:二次型用合同,线性变换用相似。
- 非齐次条件比如 $x+y=1$ 通常不是子空间,因为零向量不在里面。
- 求基时,行化简后要回到“原向量”的主元列,不是直接把化简后的行当答案。
- 特征值重根不代表不可对角化,要看特征空间维数够不够。
- 正交化最后别忘了单位化,正交和标准正交不是一回事。
- 证明题不会写时,先写定义。高代很多基础证明就是把定义展开。